Semana 9 - Montagem do polegar
Uma vez que, ao longo das últimas semanas, foram realizados vários testes utilizando um único dedo, o foco desta semana centrou-se na montagem de um segundo dedo, o polegar. Adicionalmente, foi necessário adaptar o código previamente desenvolvido para permitir o controlo simultâneo de múltiplos dedos, de forma a preparar a implementação para o funcionamento completo da mão robótica.
Montagem do polegar
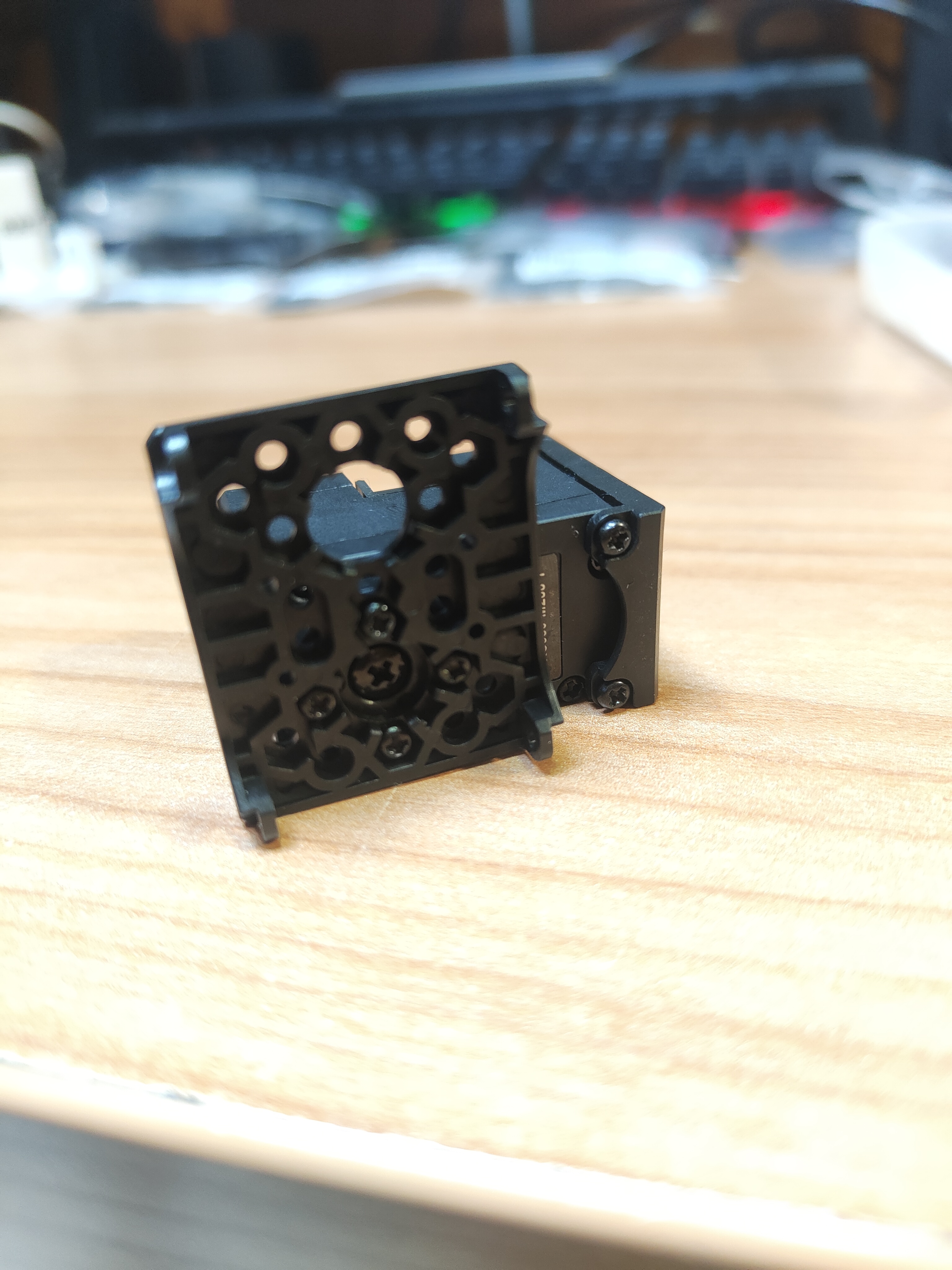
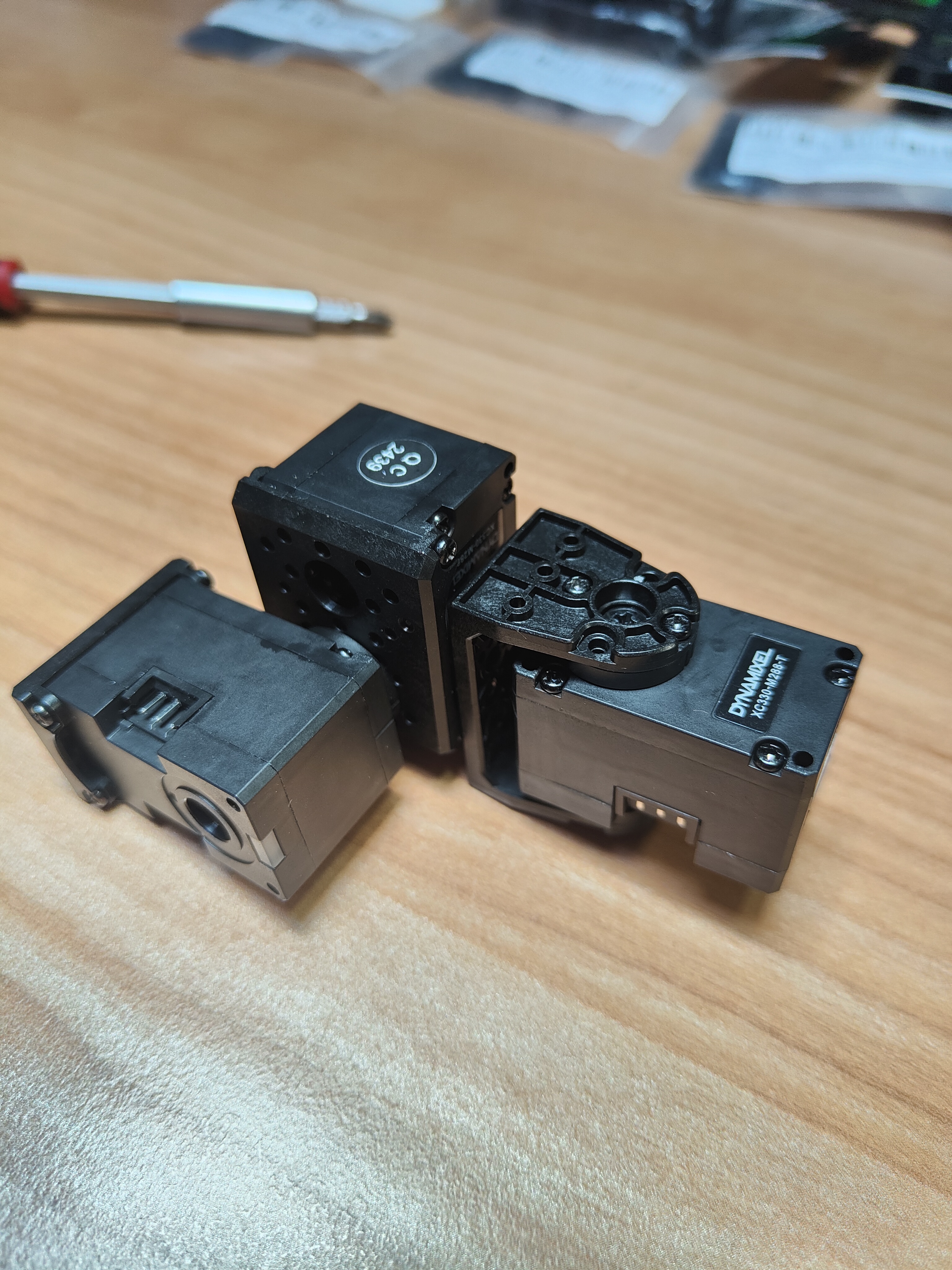
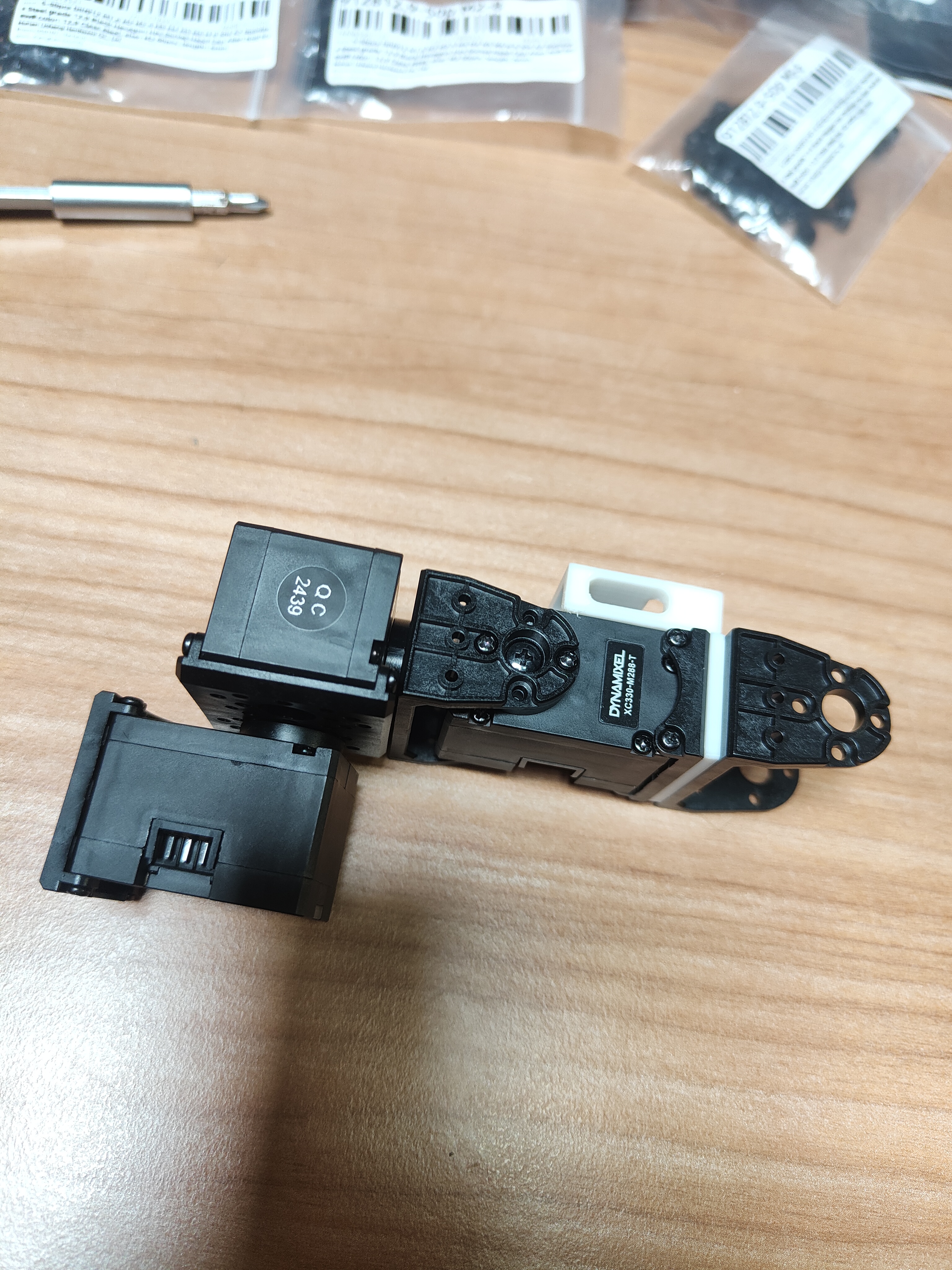
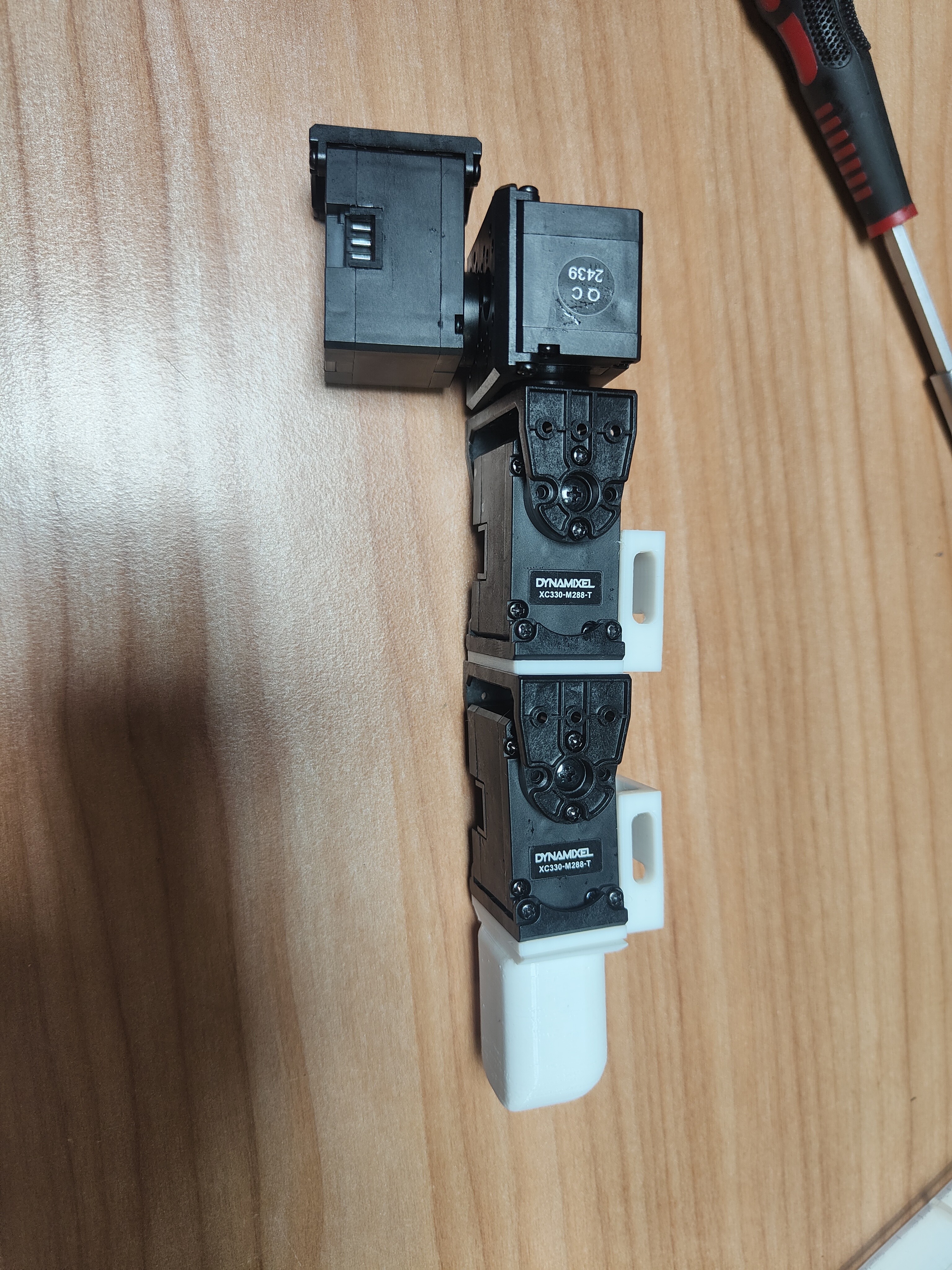
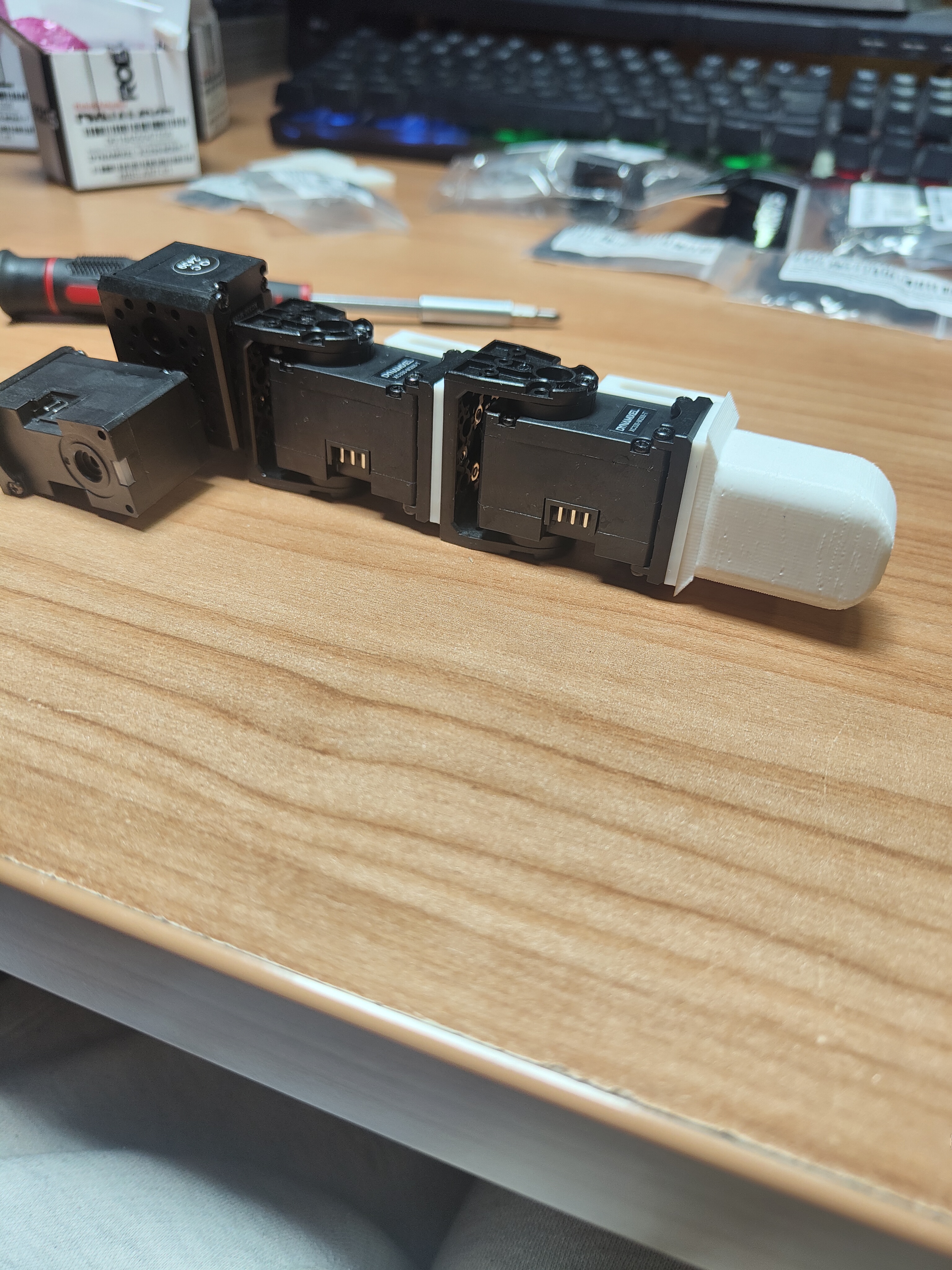
As figuras seguintes ilustram as diferentes fases da construção do dedo, seguindo integralmente as instruções fornecidas pela LEAP Hand. O processo resultou na montagem bem-sucedida de um dedo funcional.
Relativamente à ponta do dedo, foi testada uma redução do infill com o objetivo de torná-la ligeiramente mais flexível e compliant. No entanto, durante a inserção dos brass inserts, verificou-se que a densidade de infill era insuficiente para garantir uma fixação adequada, comprometendo a aderência dos inserts à peça. Por isso, optou-se por continuar com o infill recomendado, assegurando a resistência necessária para a montagem adequada da ponta do dedo.
 |  |  |
 |  |  |
 |  |  |
Pra além das imagens apresentadas, também foi gravado um vídeo ao longo das diferentes fases de construção. No entanto, esse vídeo ainda está a ser editado.
Código desenvolvido durante a semana
Durante as semanas anteriores, foi desenvolvido código para controlar um único dedo. No entanto, com a adição de mais dedos, tornou-se necessário reestruturar o código para permitir o controlo simultâneo de vários dedos.
Na nova estrutura, foi implementado um nó /manager_node, responsável pela comunicação com a porta serial, pela leitura dos dados dos motores e pela publicação dessas informações nos tópicos correspondentes a cada dedo: /middle_data, /index_data, /thumb_data e /ring_data. Além disso, este nó também subscreve o tópico /set_positions, que contém as posições alvo dos motores de cada dedo.
Para cada dedo, existe um nó manager dedicado, responsável por processar as informações lidas dos motores e tomar decisões específicas para o seu funcionamento. Essas decisões são então enviadas ao /manager_node, que as comunica aos motores.
Esta nova reestruturação melhora significativamente o funcionamento do sistema, uma vez que cada dedo é programado de forma independente. Dessa forma, caso ocorra uma falha em um dos dedos, os restantes continuam a operar corretamente, garantindo maior robustez ao controle da mão robótica.
A figura seguinte apresenta um esquema ilustrativo da nova estrutura, considerando apenas um dedo. Na próxima semana, será disponibilizado um esquema atualizado, abrangendo pelo menos dois dedos

Melhorias no código implementado da semana passada
Na semana passada, observou-se que um aumento significativo da corrente aliado a uma redução da velocidade indicava a interseção de um obstáculo pelo dedo. No entanto, devido à variação temporal na leitura das velocidades ao longo do tempo, concluiu-se que a aceleração dos motores seria um parâmetro mais adequado para essa análise. Assim, estabeleceu-se que a deteção de um obstáculo ocorrerá quando houver um aumento significativo da corrente e uma redução expressiva da aceleração, tendendo a zero, garantindo uma identificação mais precisa do momento de contato com o obstáculo.