Semana 7 - Aplicação do Current based Position Control Mode
A função de grasping de objetos é fundamental no desenvolvimento de uma mão robótica, exigindo um controlo preciso da posição, velocidade e força aplicada. Ao longo desta semana, foi analisada a possibilidade de controlar a mão utilizando um modo de controlo de velocidade com corrente limite. Além disso, foi implementado o Current-based Position Control Mode, que permite definir uma posição desejada para os motores Dynamixel, ao mesmo tempo que se estabelece um limite de corrente, tal como foi abordado na semana anterior.
É possível implementar um modo de controlo com velocidade e corrente limite?
Não. Os motores Dynamixel oferecem vários modos de controlo, mas nenhum deles permite definir simultaneamente uma velocidade e uma corrente desejada. Durante esta semana, foi analisada a possibilidade de combinar dois modos de controlo: o Velocity Control Mode e o Current Control Mode. No entanto, essa abordagem exigiria a alteração do modo de controlo dos motores Dynamixel durante a execução do programa, o que implica a desativação breve do torque de todos os motores para efetuar a mudança. Esse processo poderia causar variações indesejadas nas posições dos motores, comprometendo a estabilidade e precisão do sistema.
Aplicação do Current-based Position Control Mode
Dado que não foi possível implementar um modo de controlo que permitisse definir simultaneamente a velocidade e a corrente desejada, optou-se pela utilização do Current-based Position Control Mode. Este modo permite comandar os motores para uma posição específica, respeitando um limite de corrente previamente definido. Caso exista um obstáculo no percurso, o motor interrompe o movimento e aplica torque até atingir a corrente limite, sem a ultrapassar.
Embora este modo não permita um controlo direto da velocidade, é possível definir uma velocidade máxima através do endereço Profile Velocity. Assim, os motores deslocam-se até à posição desejada com a velocidade máxima estipulada, mas garantindo sempre que a corrente nunca excede o valor definido.
Gráficos de posição, velocidade e corrente sem obstáculo
Nas figuras seguintes, apresentam-se os gráficos da posição, velocidade e corrente ao longo do tempo para os quatro motores de um dedo. Durante a experiência, foi enviado o comando para fechar o dedo e, em seguida, reabri-lo. Os valores definidos para a corrente limite e a velocidade máxima foram os seguintes:
1
2
3
4
5
6
7
8
9
10
#Endereços
ADDR_GOAL_POSITION = 116
ADDR_GOAL_CURRENT = 102
ADDR_PROFILE_VELOCITY = 112
#Valores definidos
GOAL_CURRENT_VALUE = 100 # mA
PROFILE_VELOCITY_VALUE = 50 # aproximadamente 1.2 rad/s
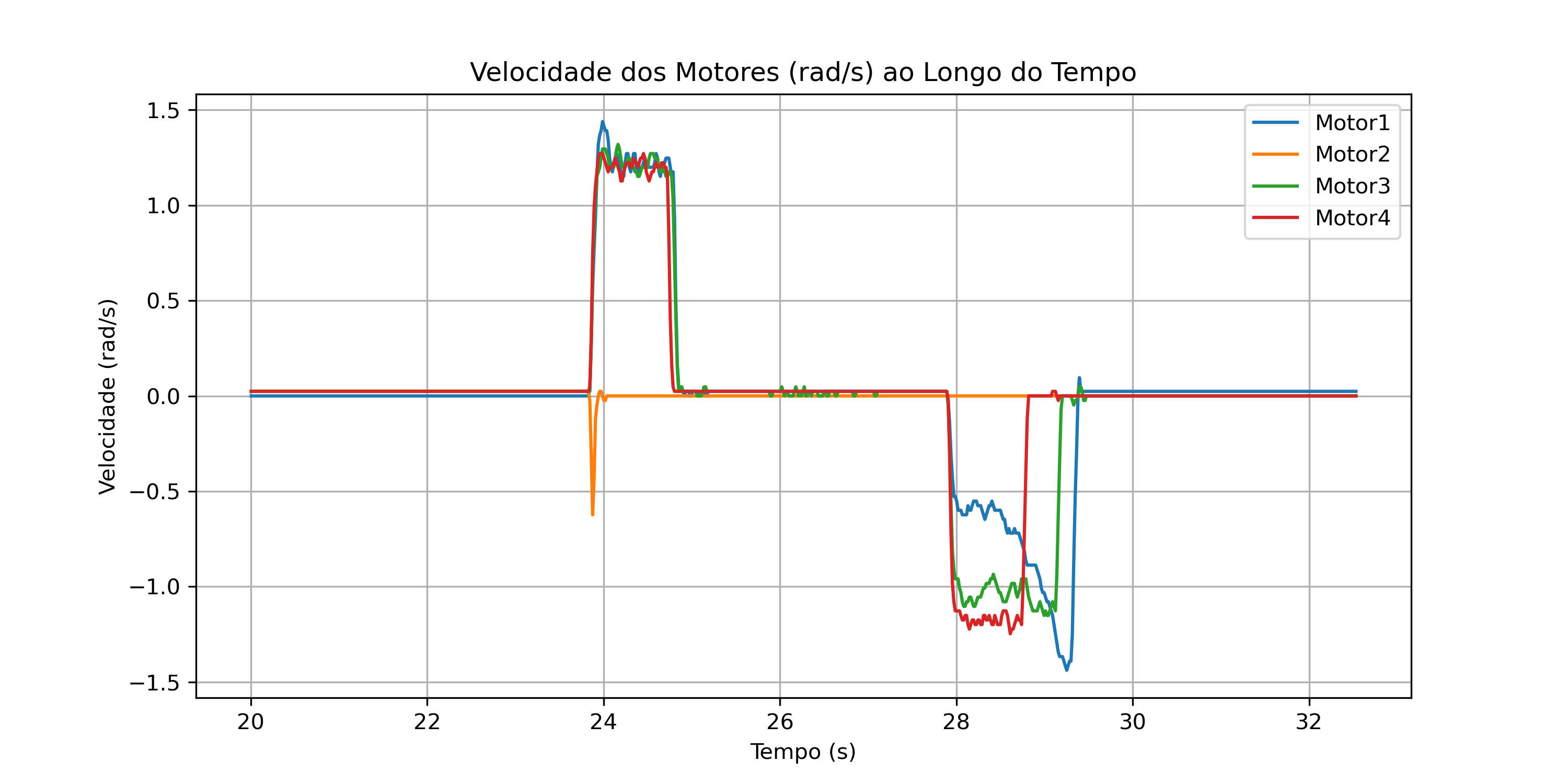
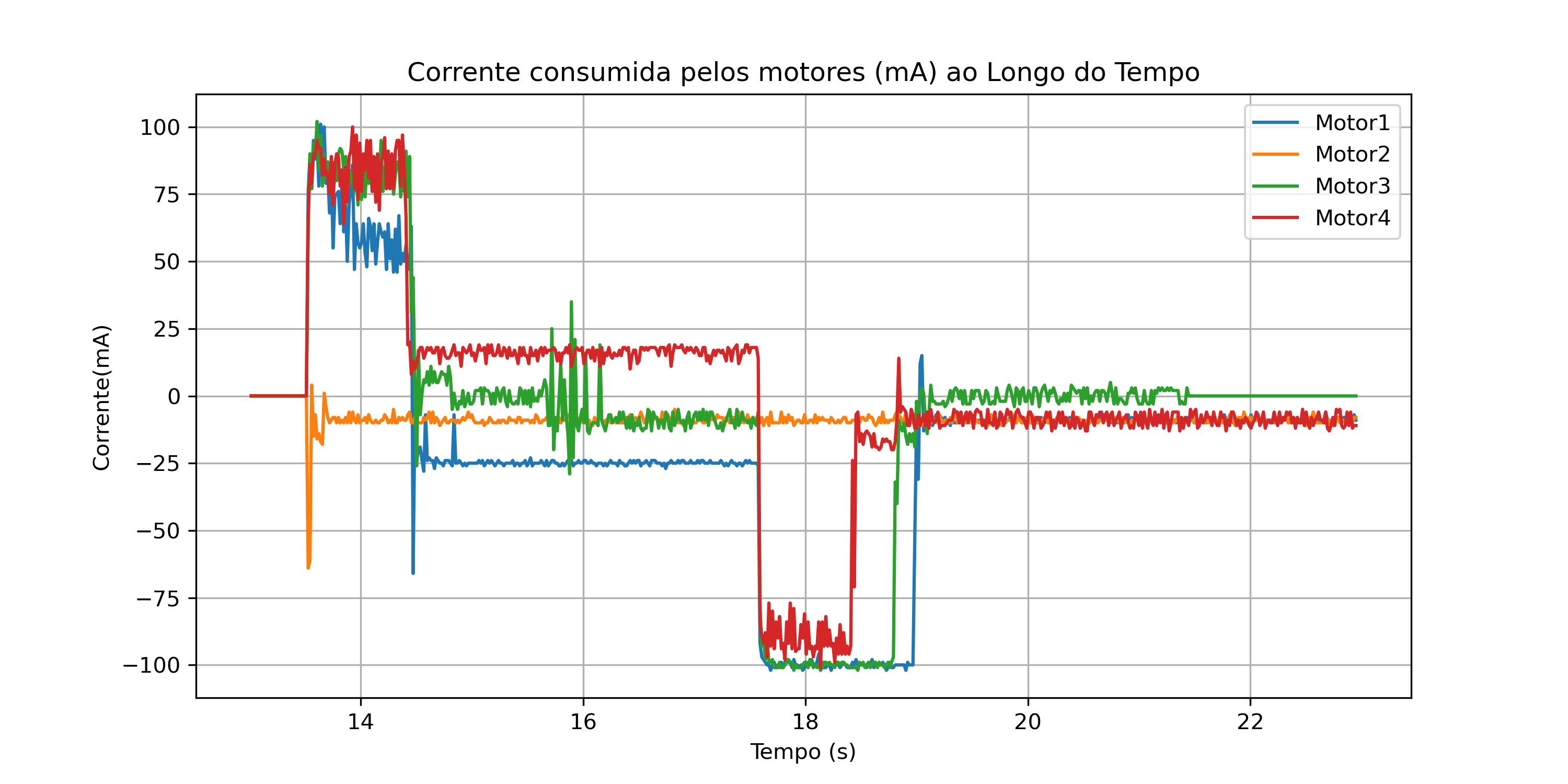
Como é possível observar, durante todo o movimento, a corrente desejada nunca foi ultrapassada, assim como a velocidade. No entanto, no motor 1, verificou-se uma pequena variação, onde a velocidade excedeu em apenas 0.07 rad/s o valor máximo definido. Essa oscilação é esperada, pois pequenas variações na velocidade são normais no funcionamento dos motores.
Além disso, ao analisar a curva de movimento dos motores, foi possível recolher um total de 62 pontos desde o instante em que o dedo se começou a mover até atingir a posição desejada. No entanto, este valor deverá variar consoante a velocidade máxima definida.
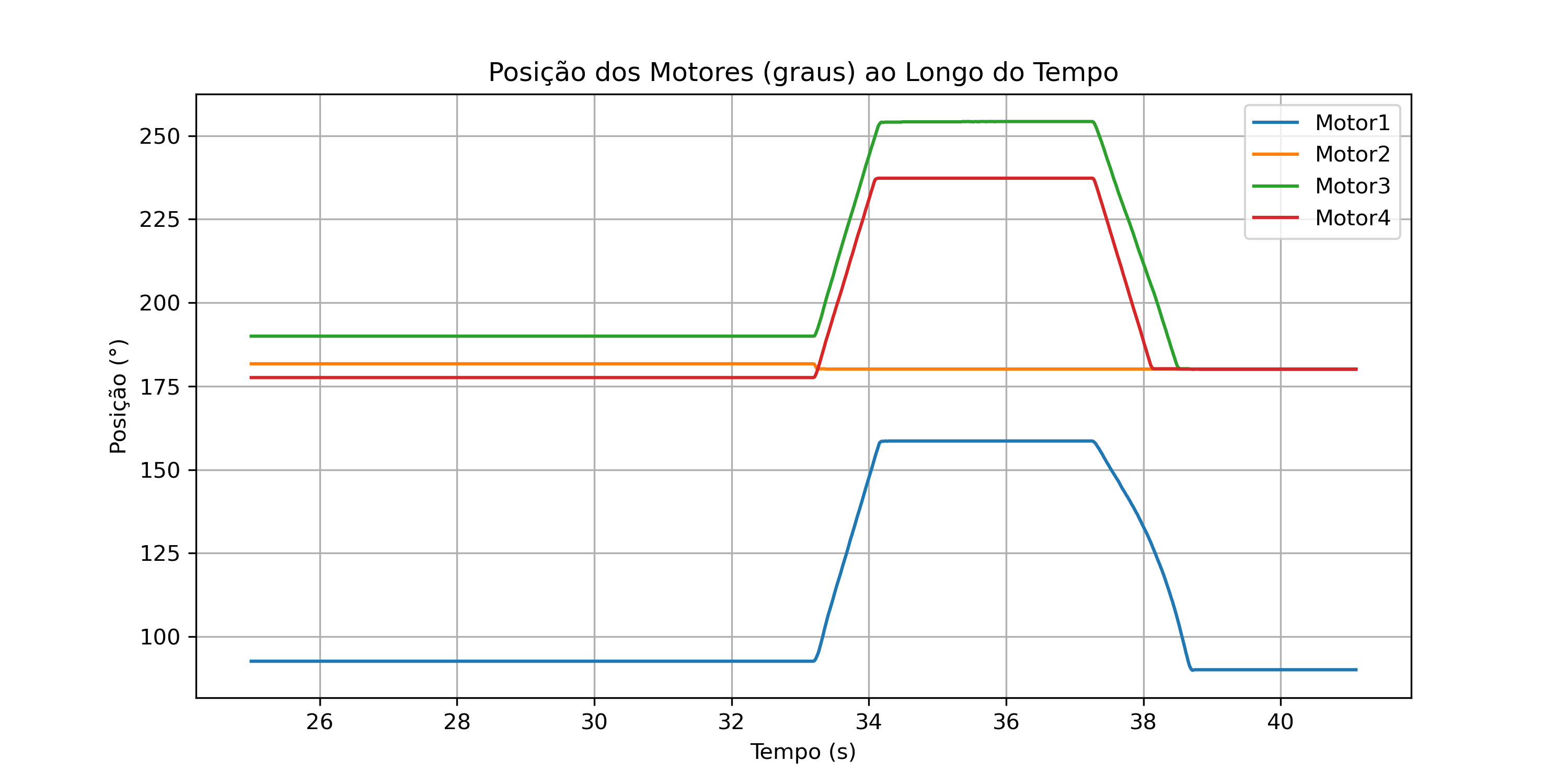
Gráficos de posição, velocidade e corrente com obstáculo
Após a análise dos gráficos de posição, velocidade e corrente consumida pelos motores de um dedo, repetiu-se a experiência anterior, desta vez com um objeto a impedir o dedo de atingir a posição desejada. De seguida, voltou-se a enviar o comando de abrir e fechar o dedo sem obstáculo com o objetivo de comparar o comportamento dos motores nas duas situações.
Nas figuras seguintes, apresentam-se os gráficos de posição, velocidade e corrente consumida para esta nova experiência, mantendo-se todos os valores definidos anteriormente.
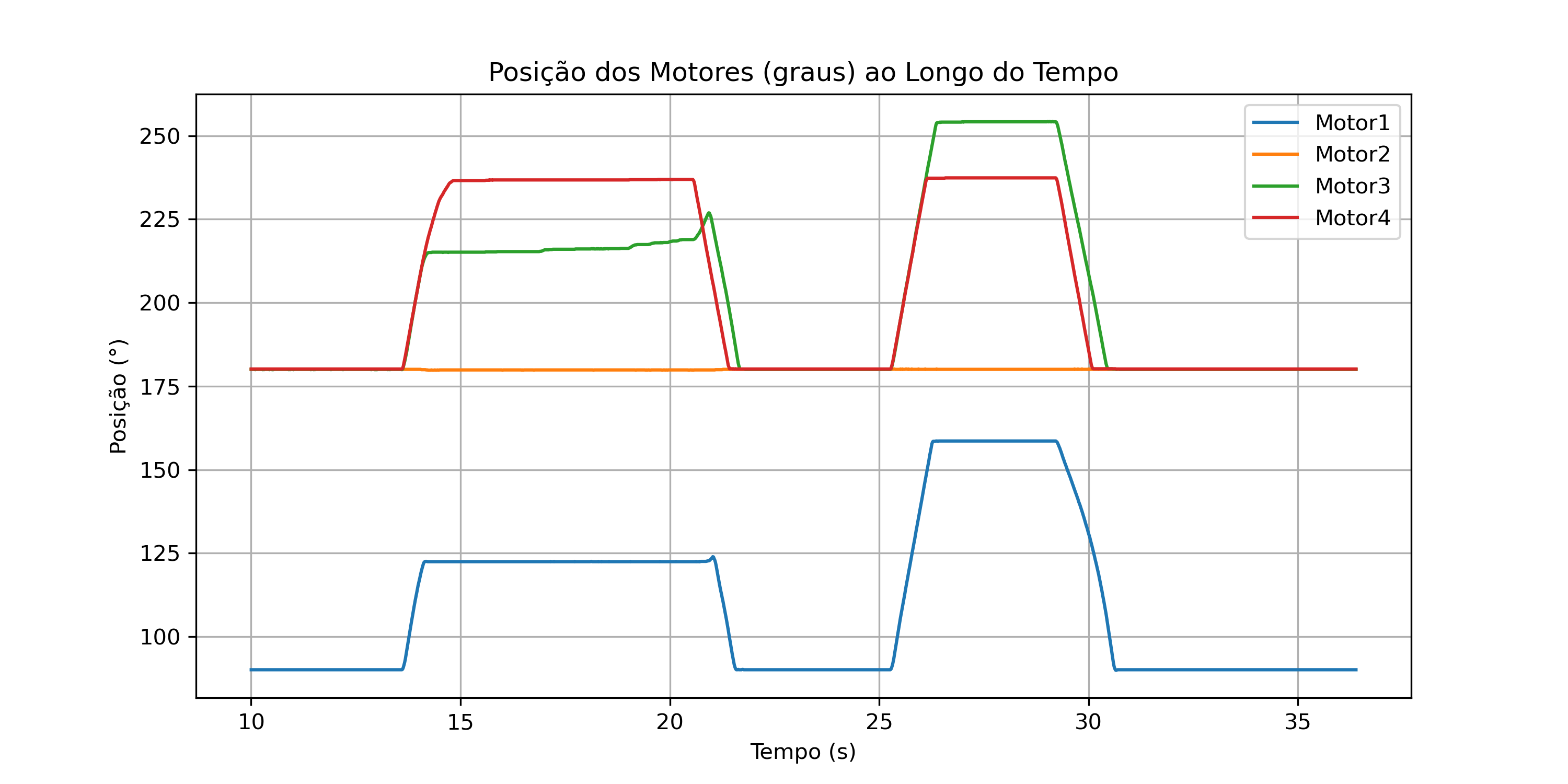
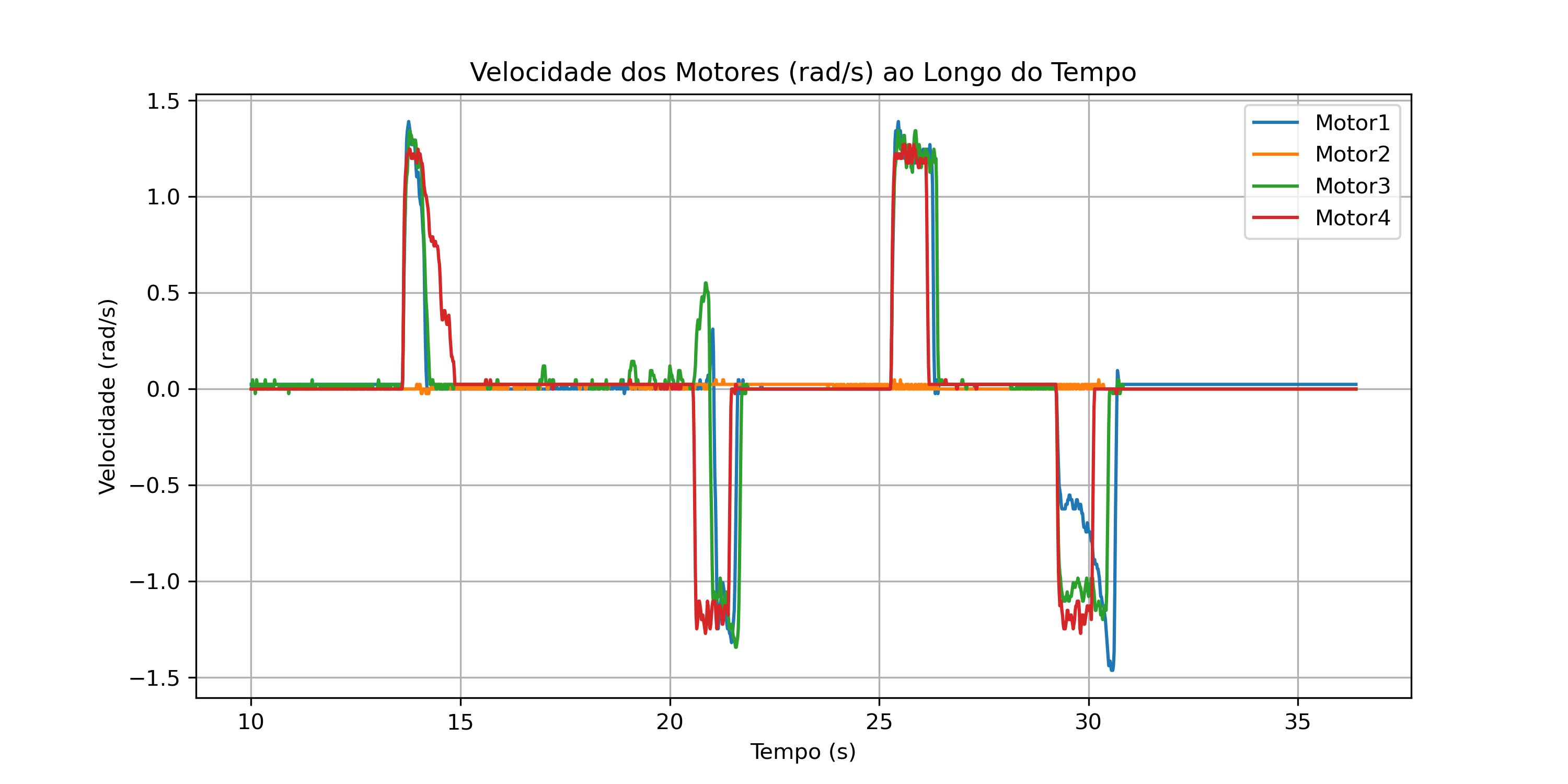
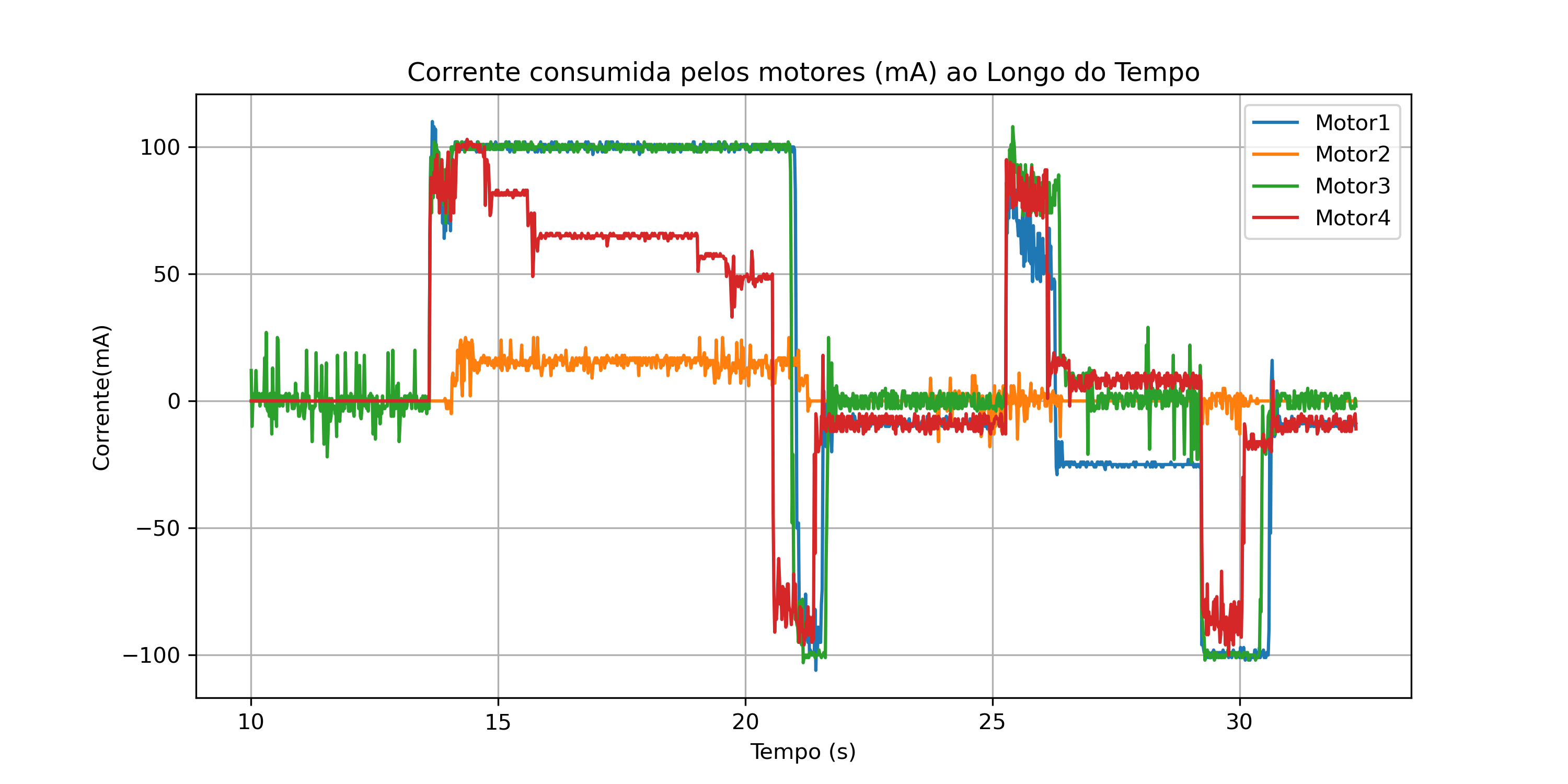
A análise dos gráficos revela diferenças significativas no comportamento do motor entre as condições com e sem obstáculo. Durante a primeira tentativa de fecho do dedo, a presença do obstáculo impede a conclusão do movimento, resultando na estabilização prematura da posição e na anulação da velocidade. Paralelamente, observa-se um aumento acentuado da corrente, refletindo o esforço do motor para superar a resistência imposta. Após a remoção do obstáculo, o movimento ocorre sem restrições, permitindo que a posição desejada seja alcançada com uma trajetória contínua, uma velocidade mais estável e um consumo de corrente inferior.
Estes resultados demonstram a eficácia do Current-based Position Control Mode, uma vez que permitem a definição de um limite de corrente, garantindo que o motor não exerça forças excessivas durante a interação com objetos. Esta capacidade é particularmente relevante para aplicações que envolvem a manipulação de objetos delicados, pois possibilita a adaptação dinâmica da corrente limite conforme a rigidez e a sensibilidade dos materiais, evitando deformações ou danos.
Código desenvolvido durante a semana
Durante esta semana foi senvolvido o seguinte código:
manager_node: foi modificado de forma a utilizar o Current-based Position Control Moderead_positions_node,read_velocities_nodeeread_currents_node: modificados de forma a guardar os valores recebidos para posterior análise.pos_graph.py,pos_vel.pyepos_curr.py: scripts python desenvolvidos para ler os dados guardados, efetuar as conversões e gerar os gráficos
Trabalho ainda em desenvolvimento
De momento os nós read_positions_node, read_velocities_node e read_currents_node ainda se encontram a ser alterados para gerarem gráficos em tempo real.