Semana 4 - Primeiros Testes com motores
Os motores Dynamixel XC330-M288-T são atuadores inteligentes reconhecidos pela sua elevada precisão, eficiência energética e design compacto. Estes motores oferecem controlo preciso de posição, velocidade e corrente, características essenciais para sistemas que requerem movimentos suaves e altamente controlados.
Uma das grandes vantagens dos motores Dynamixel é o facto de serem compatíveis com diversas plataformas tais como ROS, Python e C++. No entanto, antes de iniciar qualquer tipo de controlo destes equipamentos, é necessáriorealizar as configurações necessárias através da aplicação oficial da Dynamixel, Dynamixel Wizard 2.0.
Interface Dynamixel Wizard 2.0
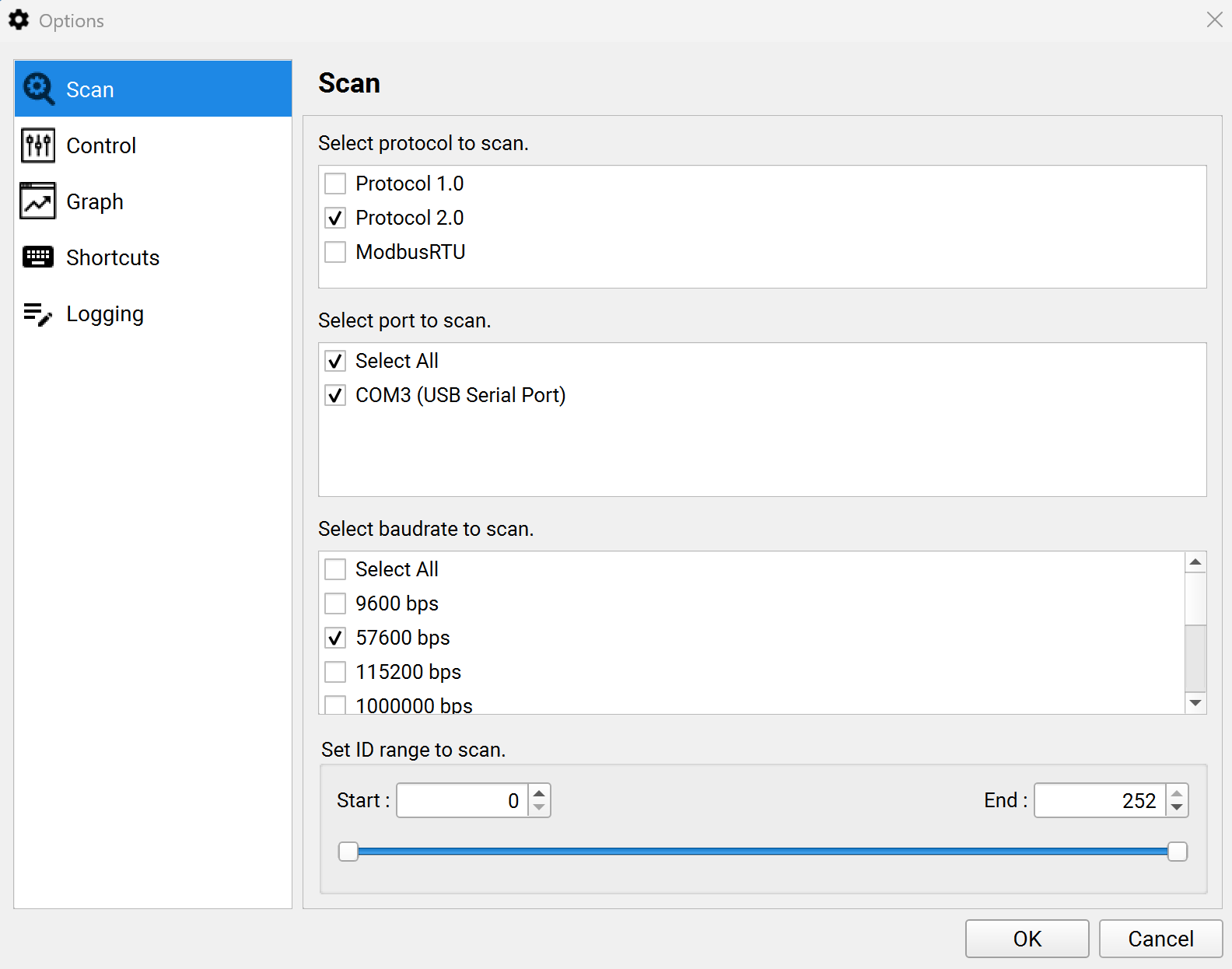
Após conectar um dos motores ao U2D2 corretamente, juntamente com a fonte de alimentação adequada, foi iniciado o programa Dynamixel Wizard 2.0. Para localizar o motor, utilizou-se a opção Scan DYNAMIXEL, que na primeira utilização do programa apresenta uma janela de configuração com diversas opções de forma a optimizar o processo de localização:
- Protocolo de Comunicação: O utilizador deve selecionar o protocolo compatível com o motor. No caso do Dynamixel XC330-M288-T, utiliza-se o Protocol 2.0.
- Porta de Comunicação: Deve especificar-se a porta em que o U2D2 está conectado. Por exemplo, na imagem abaixo, a porta selecionada é COM3 (USB Serial Port).
- Baud Rate: O baud rate deve ser configurado para corresponder ao valor utilizado pelo motor. Neste caso sabemos que o Dynamixel XC330-M288-T vem de fábrica com um baud rate de 57600 bps.
- Intervalo de IDs: O programa também permite especificar o intervalo de IDs dos motores a serem procurados. Por padrão, ele procura todos os IDs entre 0 e 252.
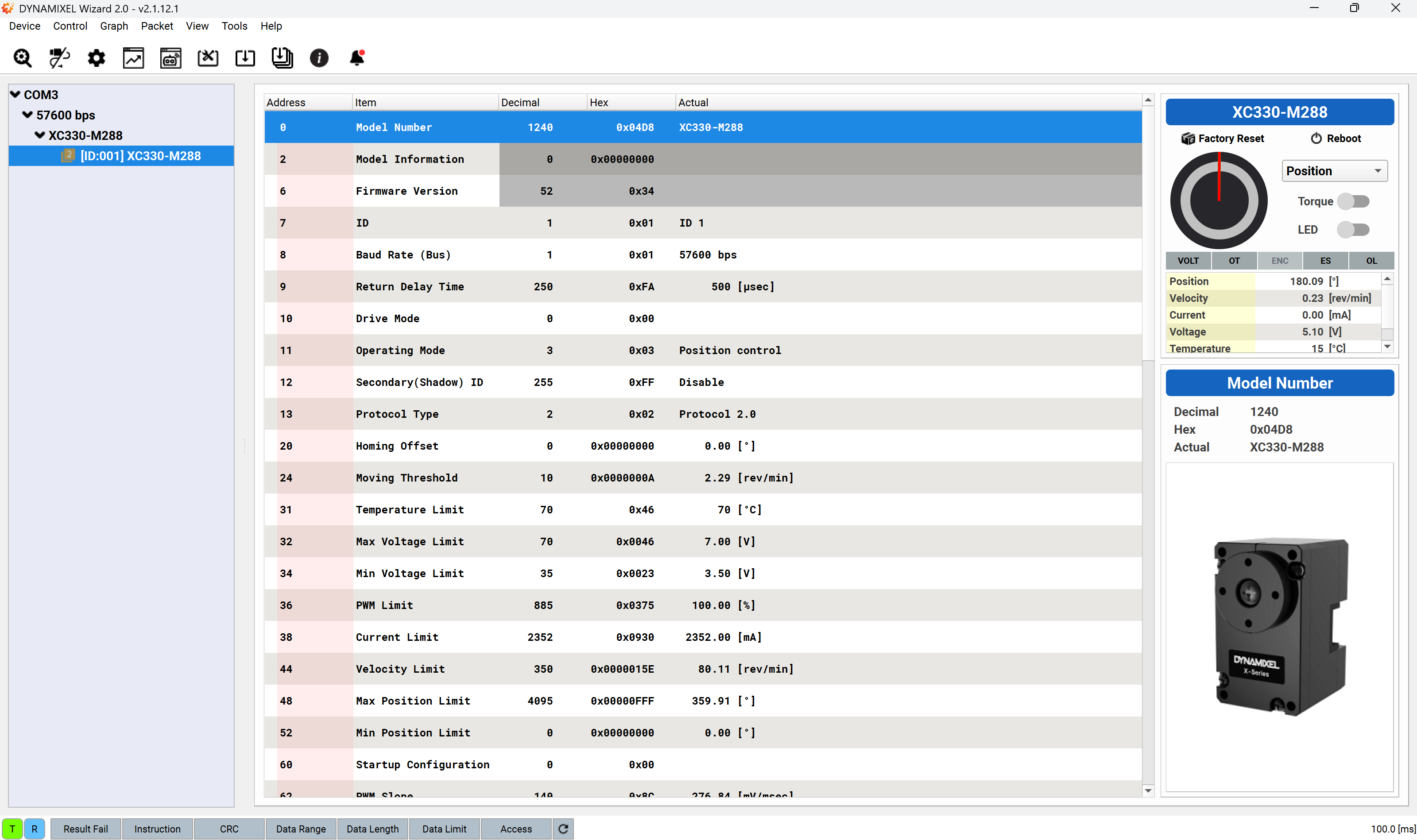
Após reconhecer o motor, já é possível verificar as características do mesmo, alterar configurações e até colocar o motor em movimento.
Colocar o motor em movimento
Os motores Dynamixel vêm configurados de fábrica na posição de 180º, também conhecida como home position. Para ajustar a posição do motor, basta ativar a opção Torque e definir a nova goal position, como ilustrado na figura abaixo.
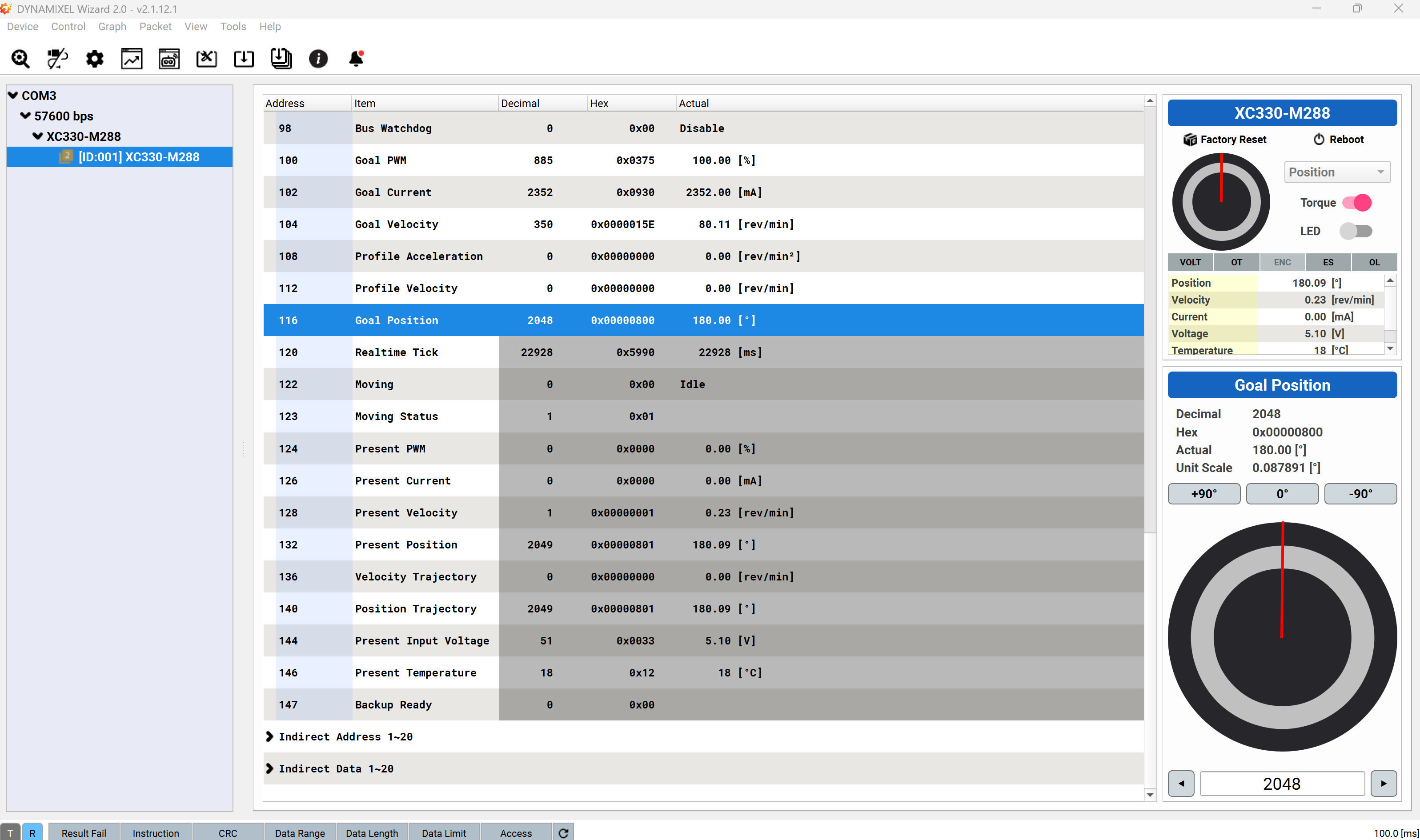
Para controlar o motor no Dynamixel Wizard 2.0, existem 3 alternativas possíveis: controlar com o dedo ao arrastar a seta vermelha da figura do motor, enviar comandos de +/- 90º ou enviar a posição correta desejada.
Os motores Dynamixel operam com uma resolução de 12 bits, ou seja, 4096 passos por rotação completa. Logo, cada passo equivale a 360 / 4096 que equivale a aproximadamente 0.09º. Para descobrir o valor que se tem de colocar para atingir a posição desejada, basta multiplicar o valor que queremos em º por 4096 e dividir por 360. Por exemplo, para ter a posição 180º, tem de se enviar o valor 2048.
Para além de controlar o motor, o Dynamixel Wizard 2.0 também permite realizar gráficos de modo a verificar o desempenho o motor. Na figura abaixo, mostra-se um gráfico com a goal position, a present position e também a velocidade do motor após enviar comandos de +90º, -90º, -90º e +90º respetivamente.
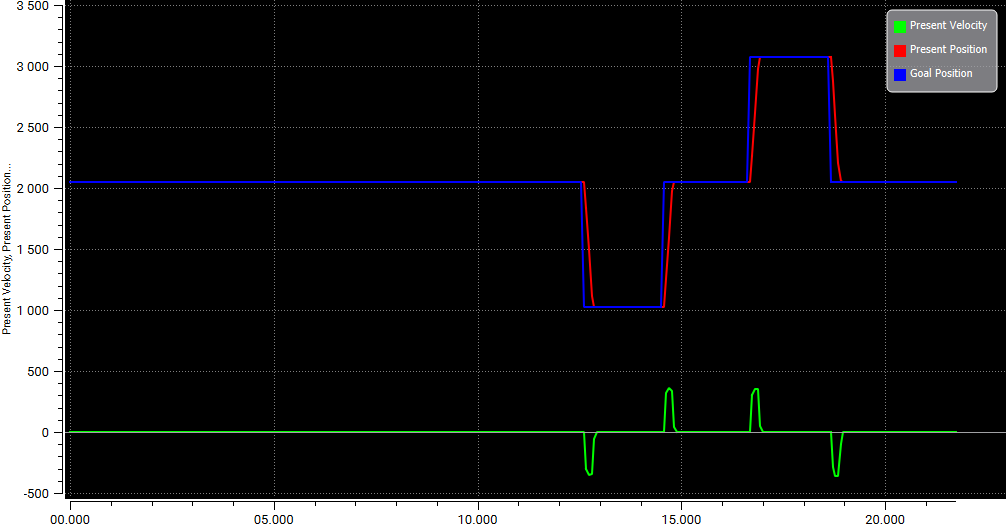
O gráfico demonstra um sistema de controlo eficiente, no qual a posição atual do motor (linha vermelha) segue com precisão a posição objetivo (linha azul) em diferentes momentos. As variações na velocidade (linha verde) indicam ajustes rápidos e controlados durante as mudanças de objetivo, evidenciando uma resposta dinâmica adequada. A estabilidade alcançada após cada transição reflete um bom ajuste no controlo, que evidencia precisão e eficiência no movimento do motor.
Motor em movimento
Nesta secção deixa-se um pequeno vídeo onde se controlou o motor através do Dynamixel Wizard 2.0 com as 3 alternativas descritas anteriormente. No futuro, o controle dos motores será realizado com o auxílio do ROS, utilizando o Dynamixel SDK, em vez do Dynamixel Wizard 2.0. No entanto, o Dynamixel Wizard 2.0 desempenha um papel fundamental na atribuição dos IDs corretos a cada motor, garantindo o controlo correto e preciso da mão que será construída.
