Semana 3 - Testes com sensores FSR
Os sensores FSR são dispositivos resistivos sensíveis à força que reduzem a sua resistência conforme a pressão aumenta. Quando não existe pressão, estes sensores apresentam uma resistência muito alta ( >10MΩ) e à medida que a força aumenta, a resistência diminui. Para ler os valores do sensor FSR, normalmente é necessário montar um divisor de tensão com uma resistência fixa pois este converte a mudança de resistência do FSR numa variação de tensão que pode ser medida por uma entrada analógica do microcontrolador. Para além disso, a escolha da resistência fixa no divisor de tensão pode melhorar a sensibilidade e a precisão do circuito.
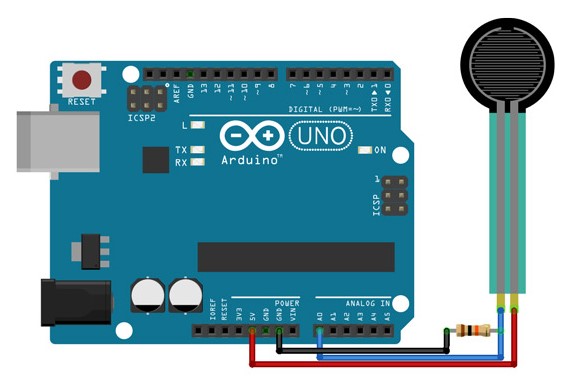
Neste post irão ser aplicados vários valores de resistências no divisor de tensão de modo a obter um equilíbrio de sensibilidade e estabilidade nos dados recolhidos. Para tal irá utilizar-se um circuito semelhante ao apresentado na figura 1, a única diferença é que iremos utilizar o microcontrolador Teensy 4.0 e o pino de alimentação será o de 3.3V.
Para converter o valor lido pelo ADC em volts, utilizamos a seguinte fórmula:

Onde fsrValue é o valor lido pelo ADC, 3.3 é o valor de Vin uma vez que o nosso sensor está conectado ao pino de 3.3V e 1023 corresponde à resolução de 10 bits do Teensy.
Sensibilidade do Sensor com um leve toque
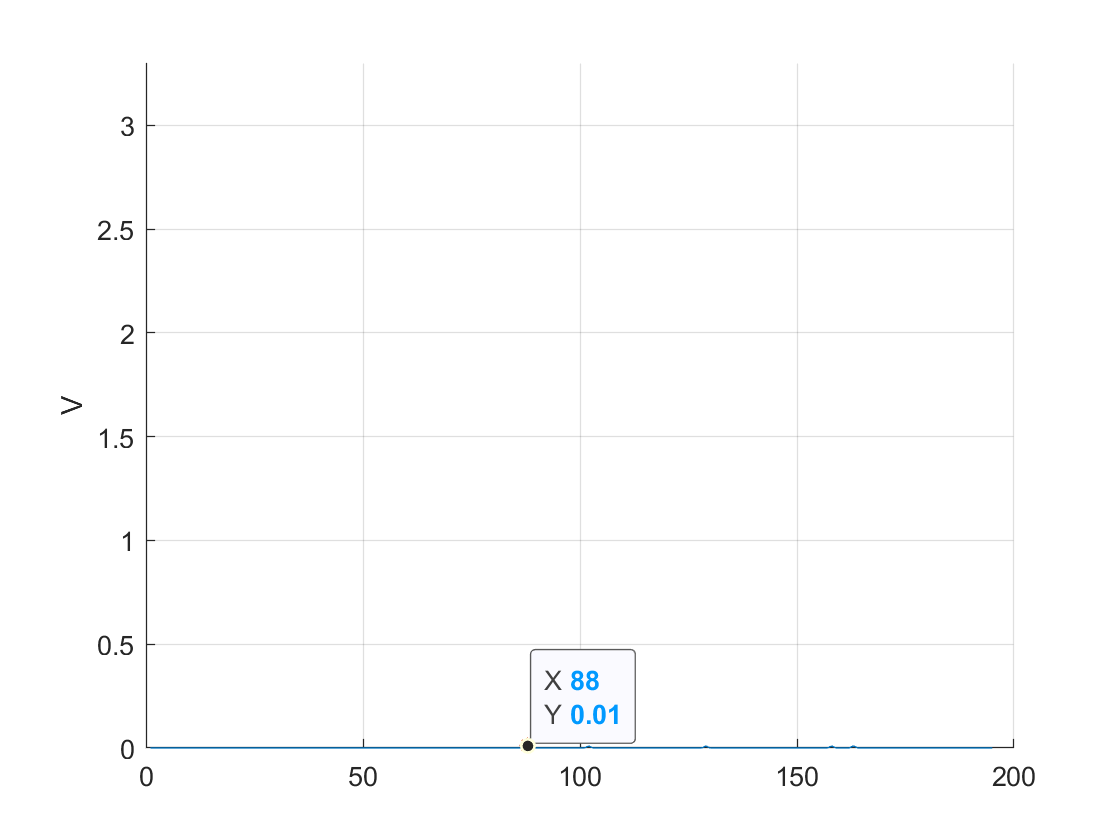
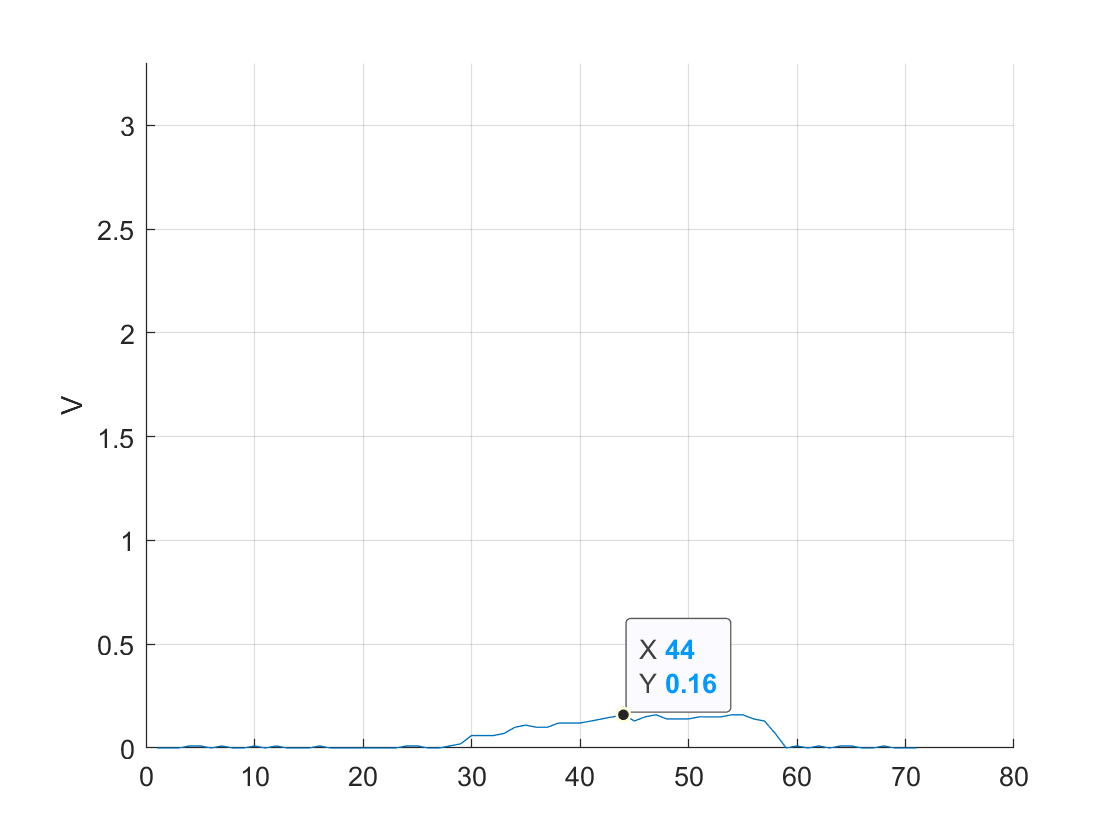
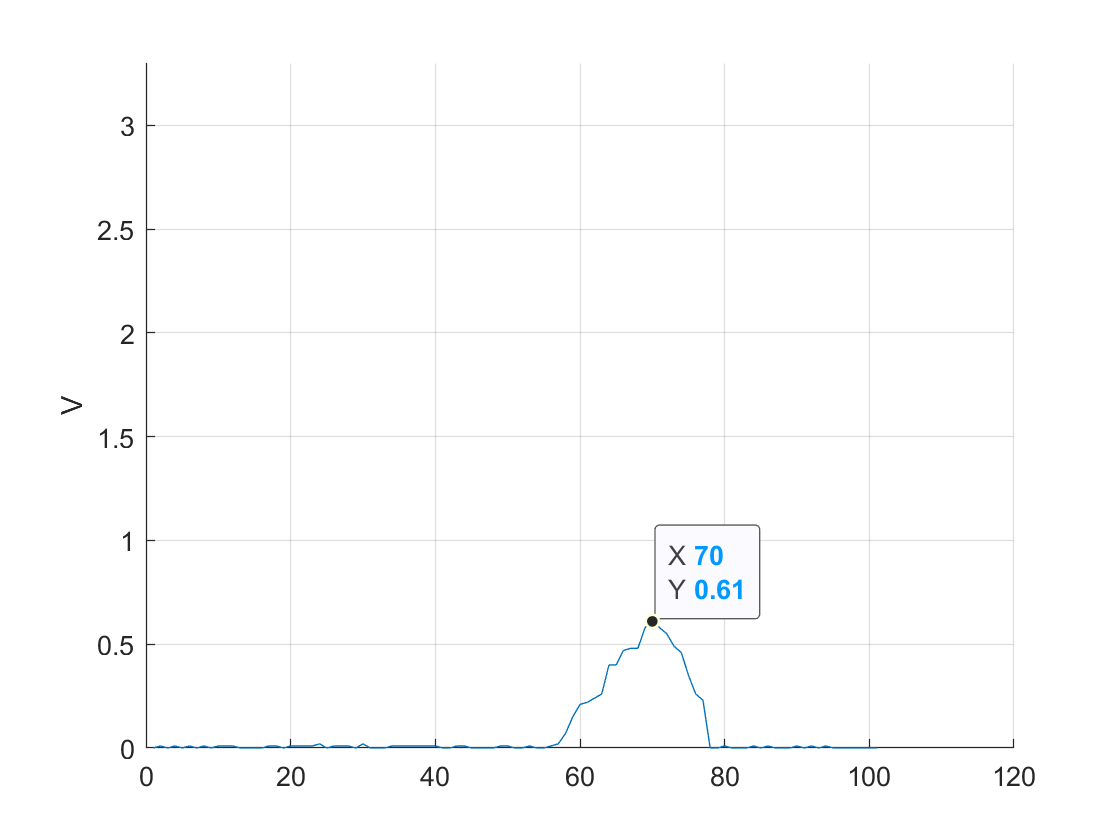
As figuras apresentadas abaixo mostram os valores obtidos para diferentes valores de resistências no circuito ao efetuar-se um leve toque com o dedo no sensor de forma a testar a sensibilidade do sensor.
 |  |  |  |
 | 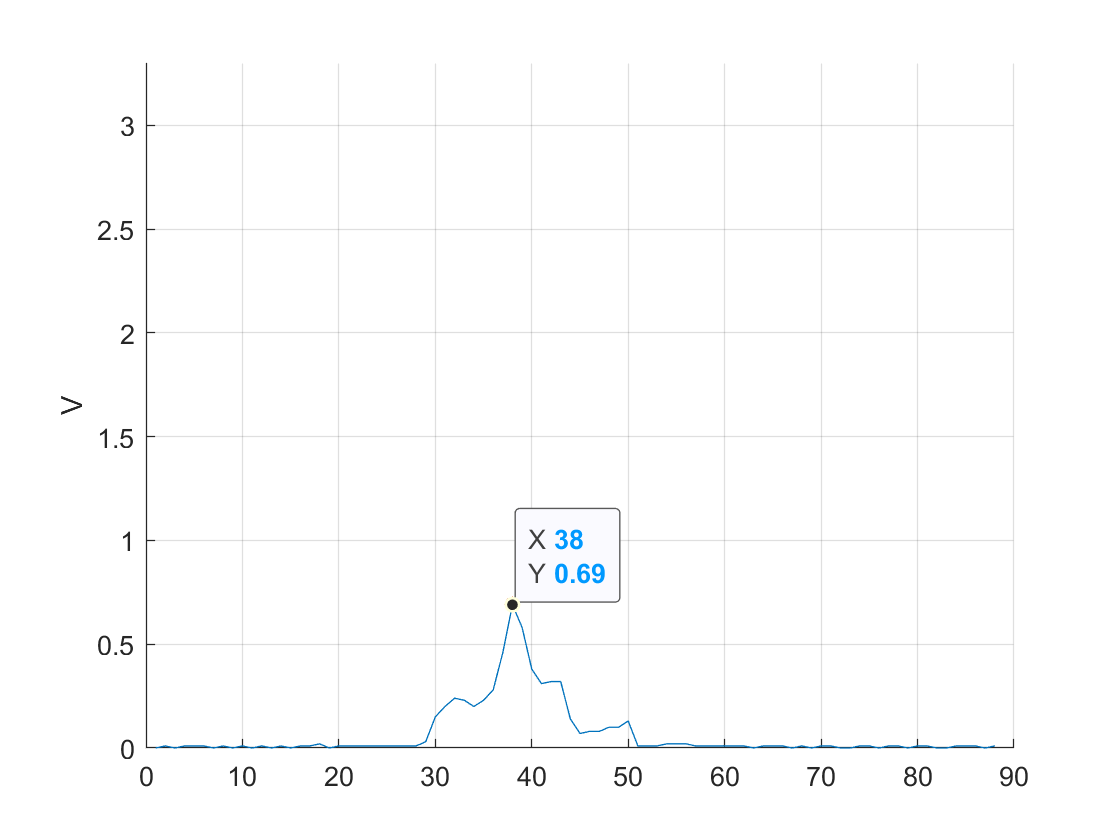 | 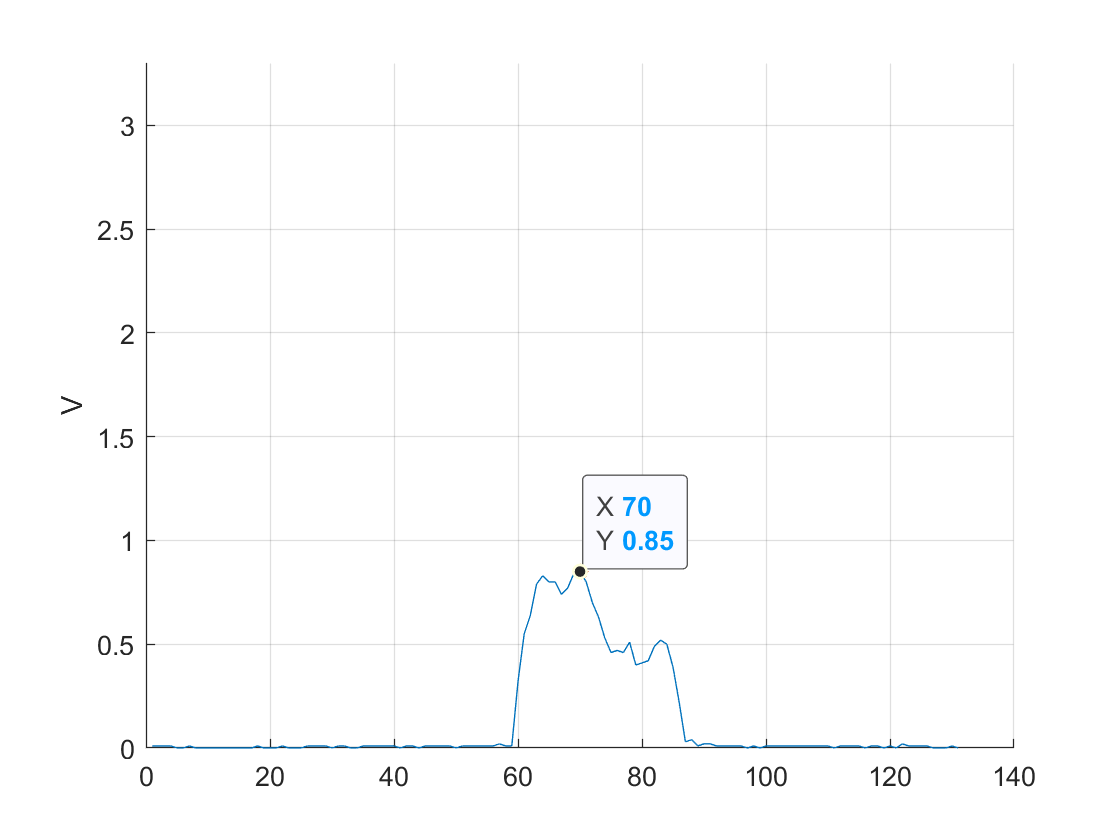 |  |
Através da análise das figuras é possível verificar que para resistências com menores valores, o sensor apresenta muito pouca sensibilidade (no caso de 1kΩ nem é possível verificar quando é que o sensor foi tocado pelo dedo). Para valores muito altos de resistências, verifica-se que a sensibilidade aumenta, mas também aumenta a instabilidade do sinal (no caso de 39 kΩ também não é possível verificar quando é que o sensor foi tocado devido à falta de estabilidade do sinal).
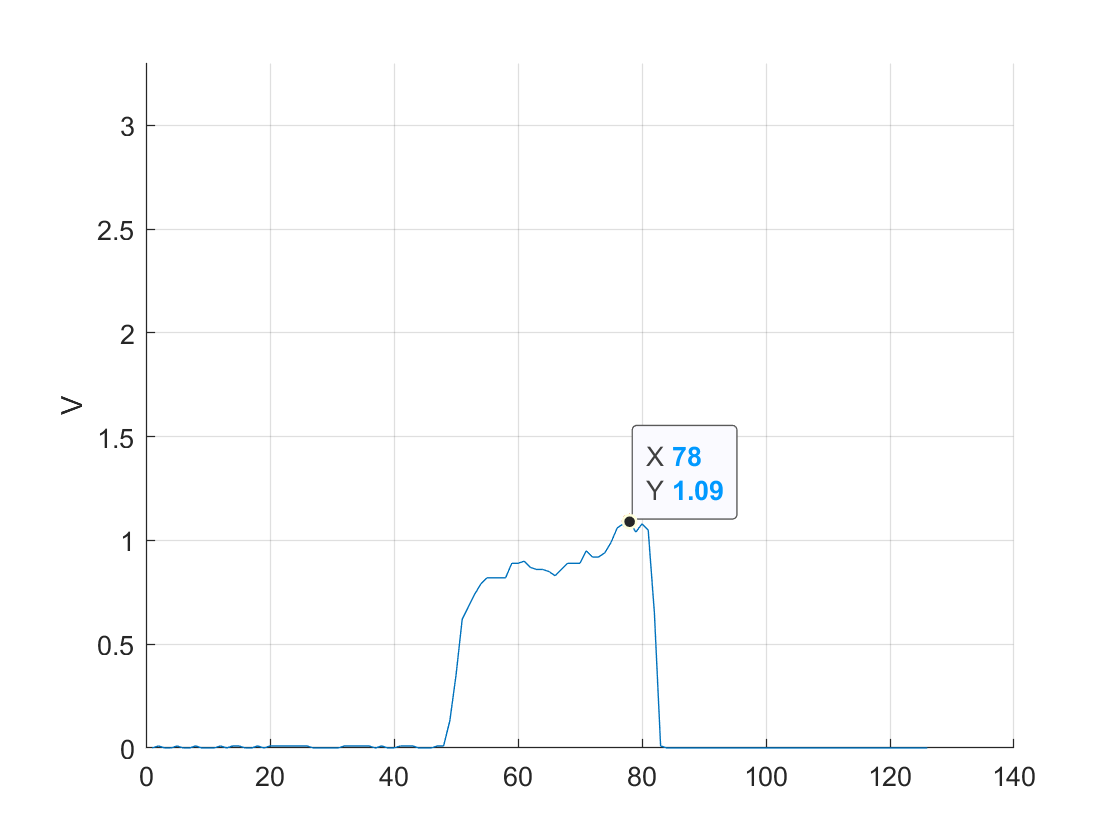
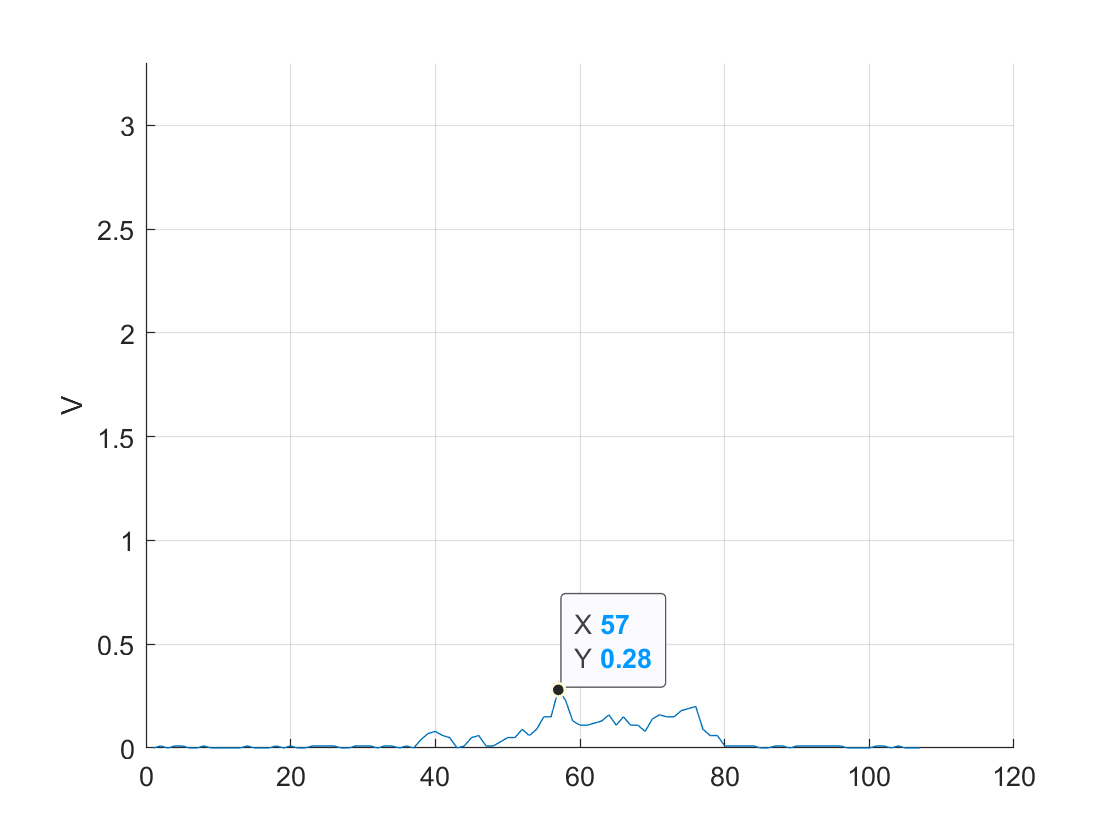
Sensibilidade do Sensor com aplicação de uma força
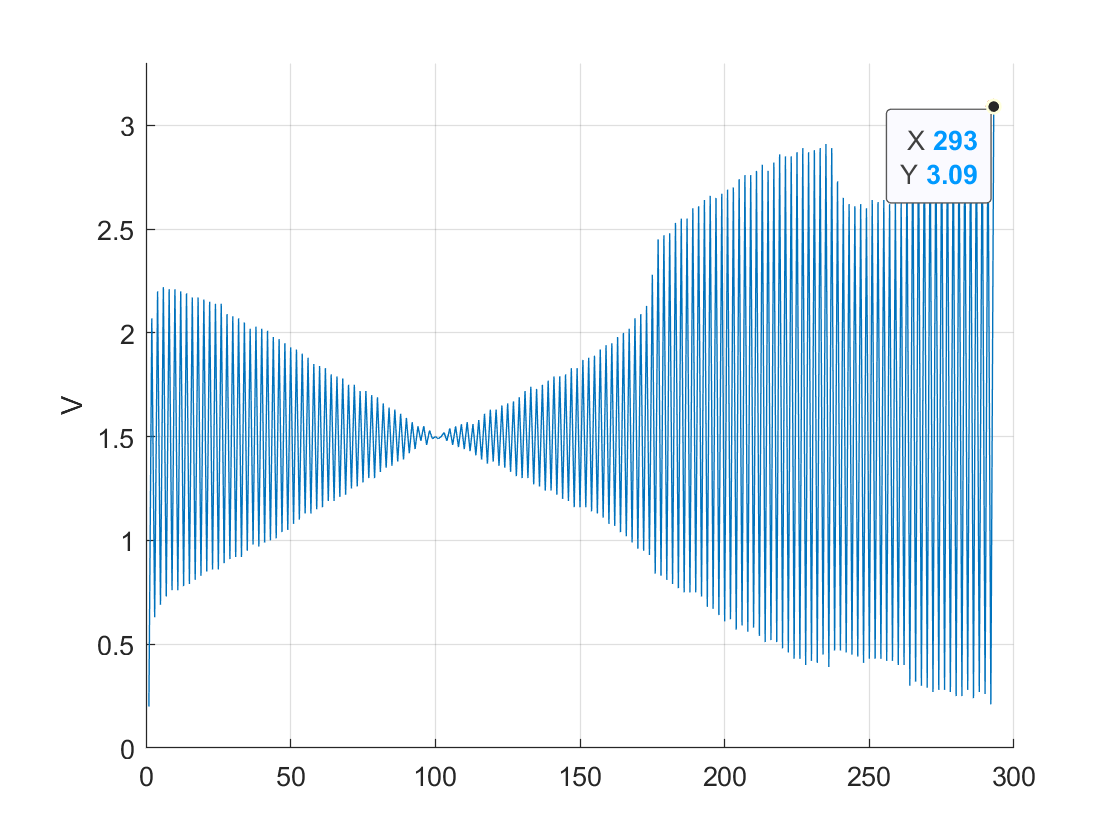
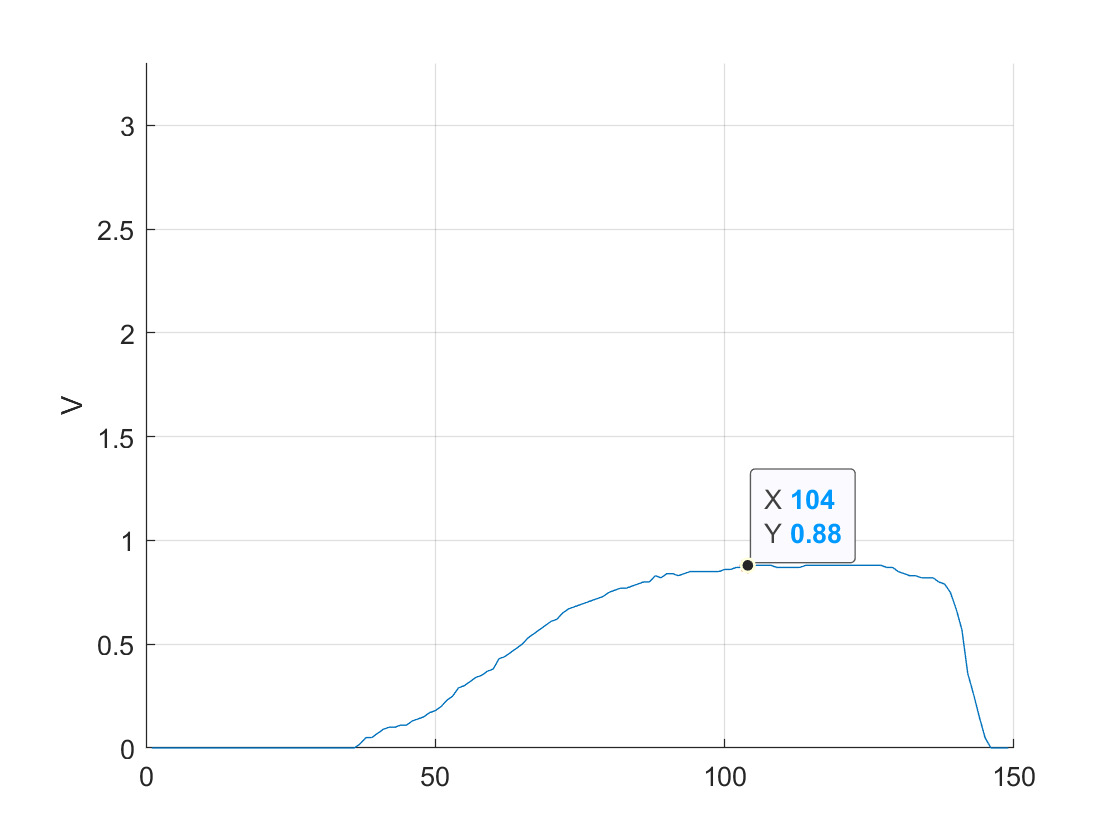
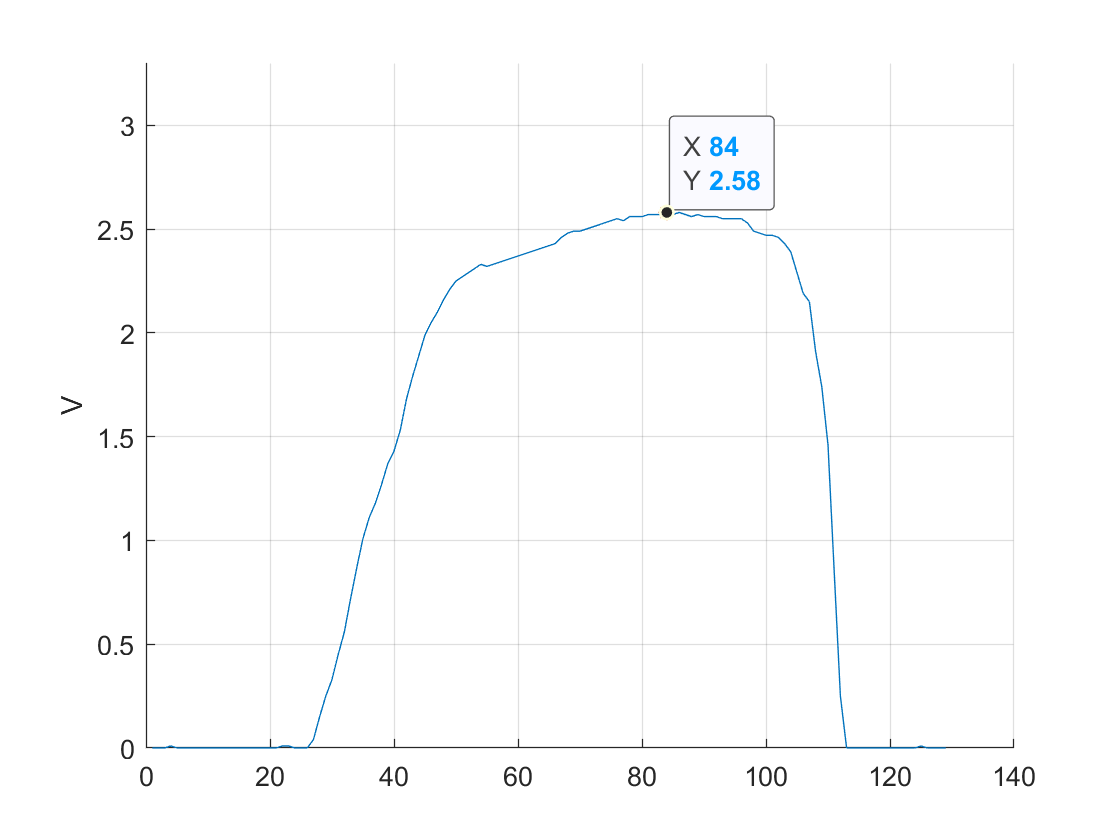
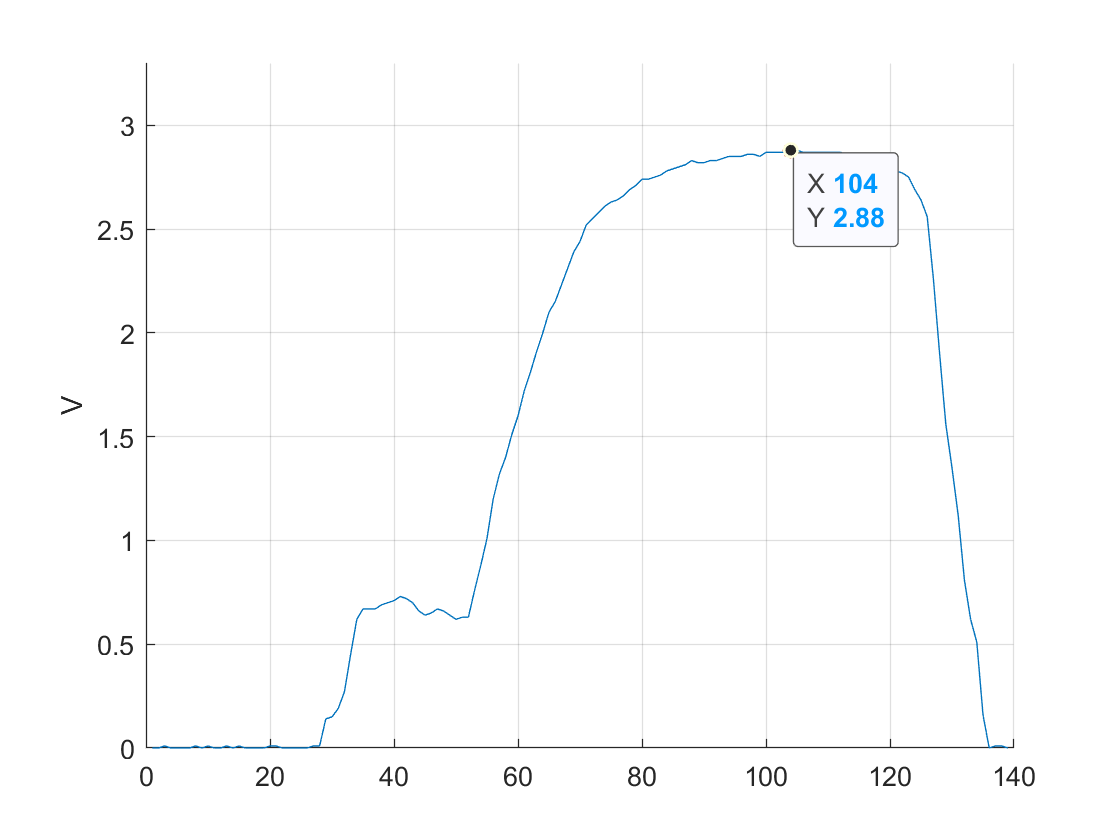
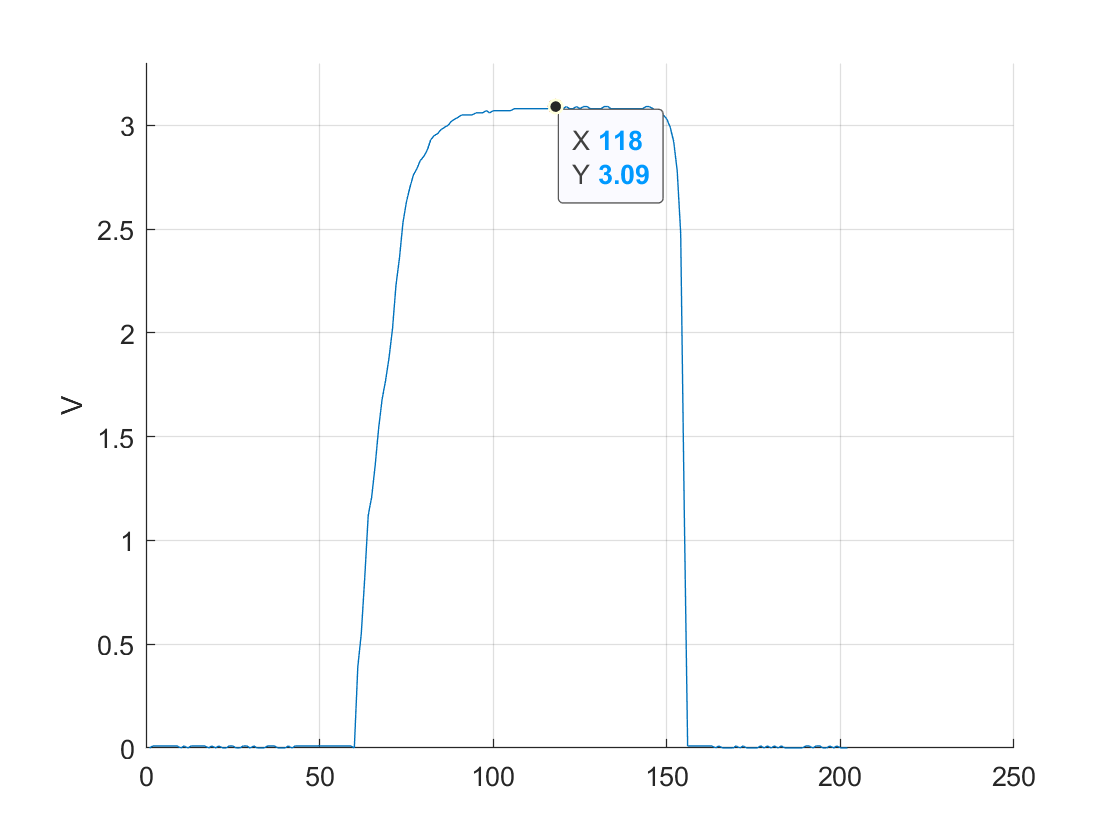
Nas figuras apresentadas abaixo, apresentam-se os dados recolhidos ao aplicar a máxima força possível com um dedo.
 |  |  |  |
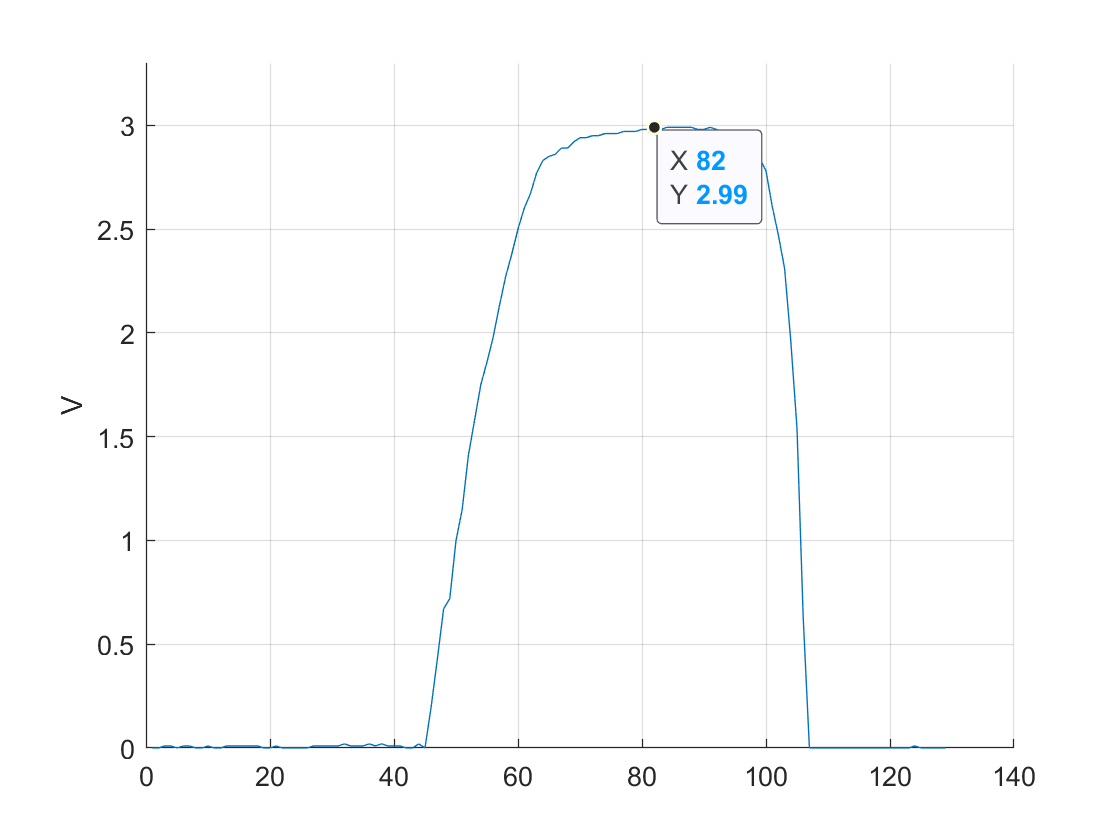 | 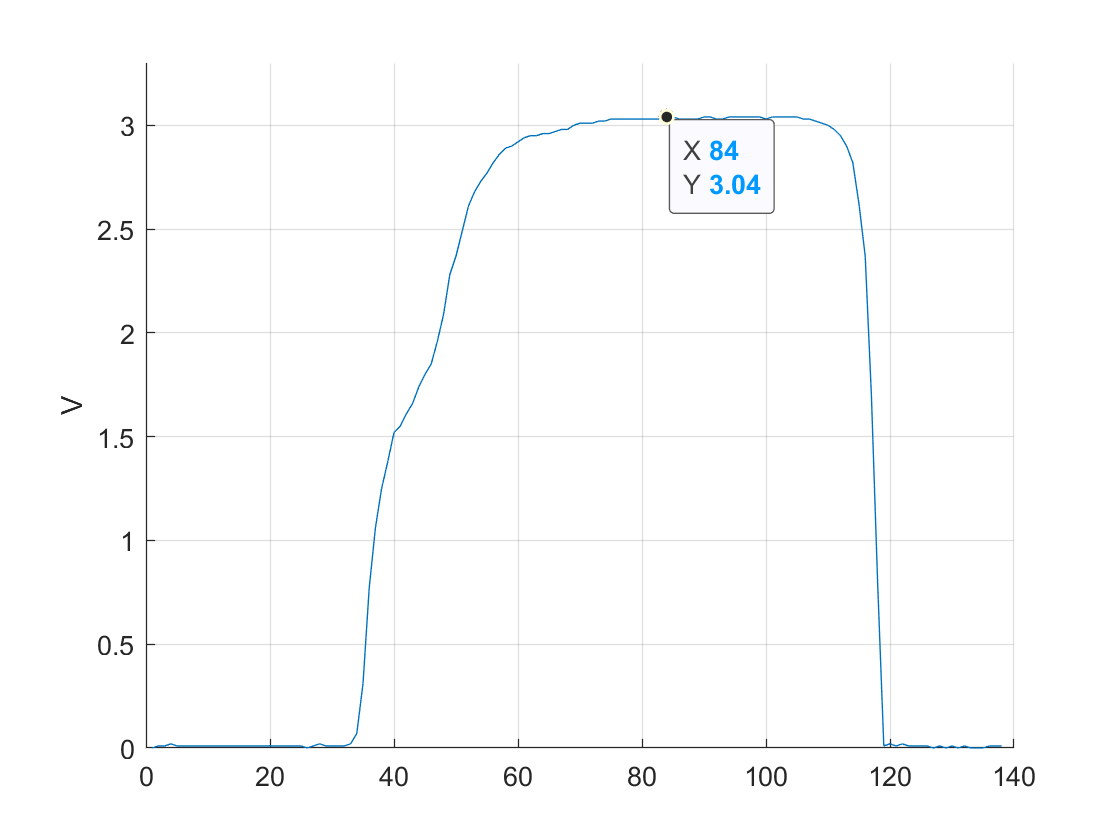 | 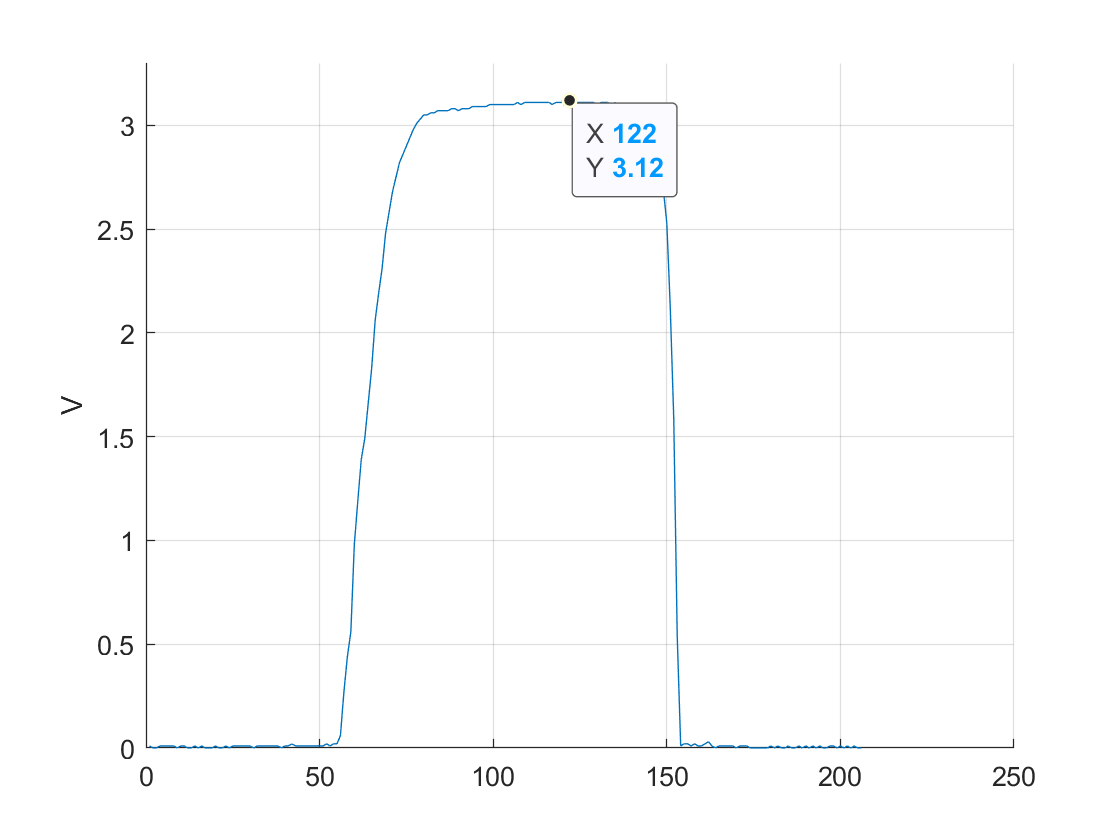 | 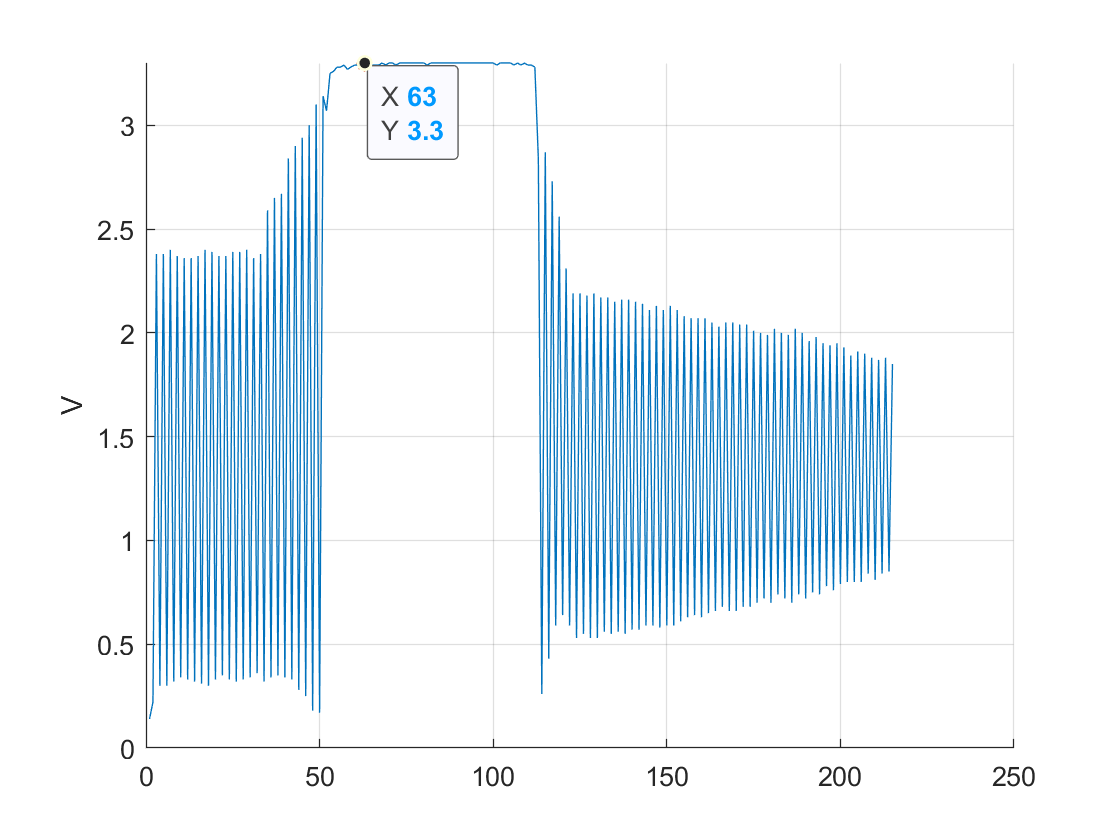 |
Tal como analisado anteriormente, um aumento da resistência resulta numa maior sensibilidade, mas também amplifica o ruído. Isso é evidente na figura correspondente à resistência de 39 kΩ, onde a voltagem atingiu o valor máximo de 3.3 V, mas apresentou instabilidade. Por outro lado, com a resistência de 1 kΩ, observou-se uma subida menos acentuada na voltagem quando aplicada força, indicando uma resposta mais lenta do sensor.
Conclusões
Os dados recolhidos indicam que o aumento da resistência no divisor de tensão do circuito provoca o aumento de sensibilidade mas também o aumento da instabilidade do sinal. No entanto, as experiências realizadas não permitem obter conclusões definitivas, uma vez que a aplicação manual de força com o dedo dificulta a replicação exata da mesma força em testes diferentes.
No futuro, irão ser realizadas experiências utilizando massas pré-definidas, permitindo uma avaliação mais precisa do valor ideal de resistência a ser aplicado no circuito. Com base nos dados obtidos até agora, os valores de resistência que melhor equilibram estabilidade e sensibilidade são 20.2 kΩ e 32.7 kΩ.