Semana 11 - Velocidades Relativas entre os dedos e falanges
O ser humano possui uma notável capacidade de executar uma ampla variedade de movimentos com a mão, aplicando diferentes velocidades tanto entre os dedos como entre as falanges de um mesmo dedo. Esta habilidade permite a realização de gestos que, embora pareçam semelhantes, são significativamente distintos e adaptáveis a diferentes situações. Um exemplo disso é o ato de fechar a mão, que pode ocorrer de maneiras diversas, como iniciando o movimento pelo polegar ou, alternativamente, pelos restantes dedos.
Nesta semana, o foco do trabalho esteve no desenvolvimento de um mecanismo capaz de aplicar fatores de velocidade relativa, tanto entre os diferentes dedos quanto entre as falanges de cada dedo. Esta abordagem permite a execução de distintos padrões de movimento, como o exemplo mencionado anteriormente, onde a mão pode ser fechada de diferentes formas, dependendo da sequência e da velocidade aplicada a cada segmento. Para além disso, está em desenvolvimento um mecanismo para detetar colisões entre os dedos com base na cinemática de cada um. Etse sistema permitirá identificar interseções entre os movimentos dos dedos.
Velocidades relativas entre dedos e falanges
Neste post, serão apresentadas duas experiências para analisar o impacto da velocidade relativa tanto entre os dedos quanto entre as falanges de um mesmo dedo.
Na primeira experiência, será aplicada ao middle finger uma velocidade duas vezes superior à do polegar, permitindo avaliar o efeito da diferença de velocidade entre os dedos.
Na segunda experiência, o foco será exclusivamente a variação da velocidade entre as falanges de um único dedo. Para isso, a primeira falange terá o dobro da velocidade das restantes, possibilitando observar como essa diferença influencia o movimento global do dedo.
Velocidade relativa entre dedos
Nas figuras seguintes, são apresentados os gráficos de posição, velocidade e corrente para ambos os dedos na condição em que o middle finger opera com o dobro da velocidade do polegar.
Além disso, também são disponibilizados os links para os vídeos no YouTube que documentam esta experiência, permitindo uma visualização mais detalhada do comportamento da mão robótica em tempo real.
Gráficos
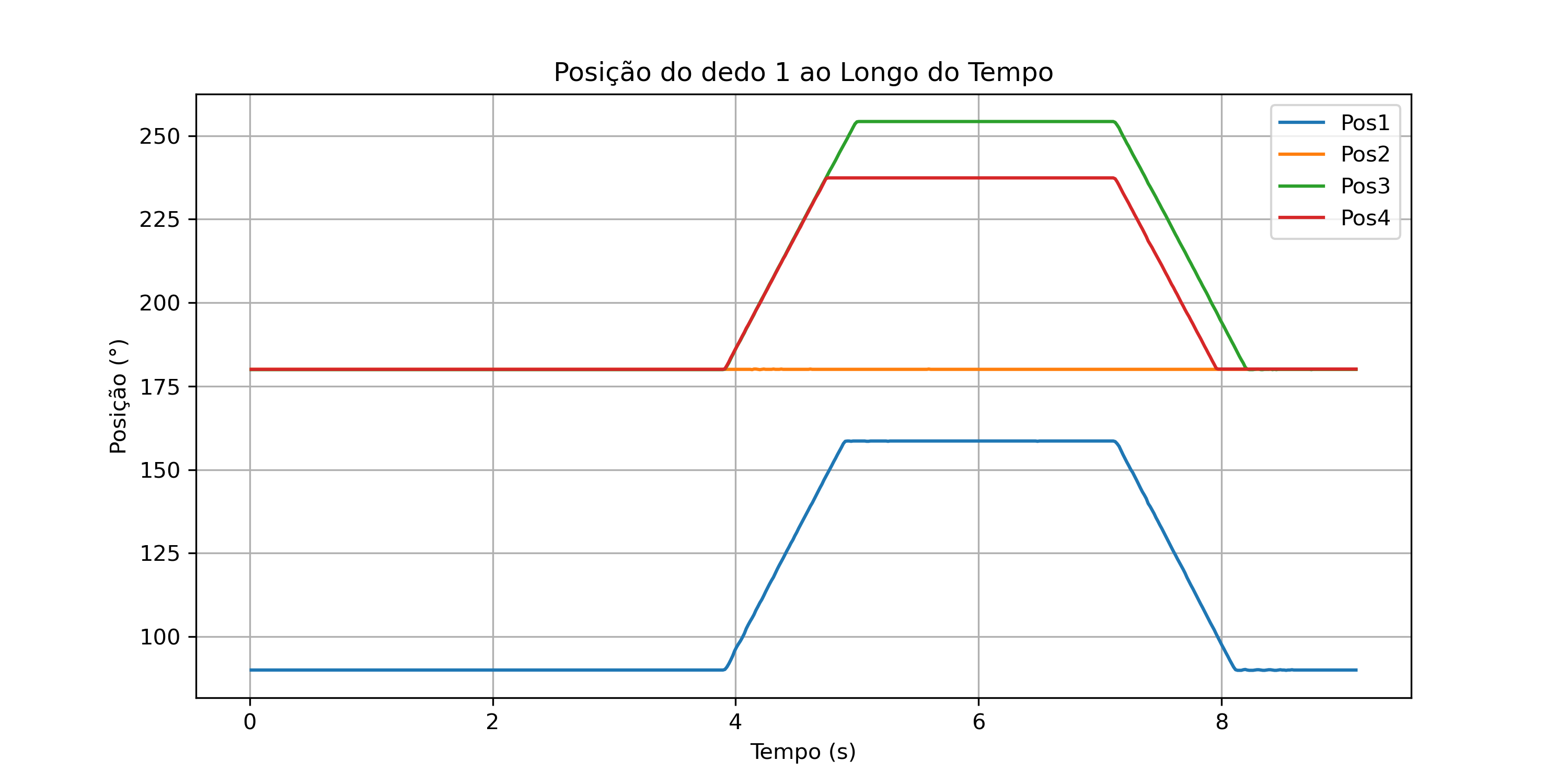
Posições do middle finger
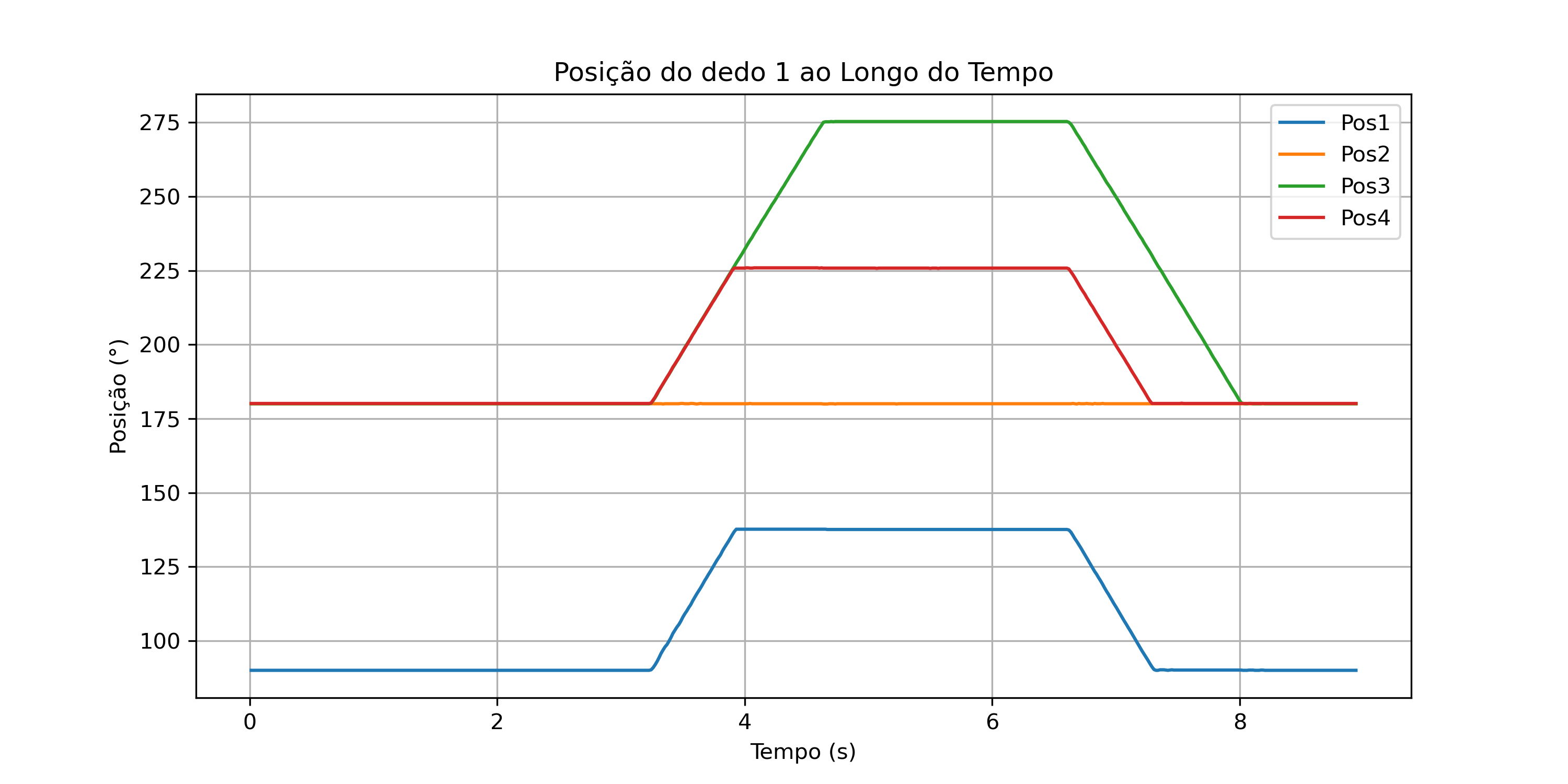 | 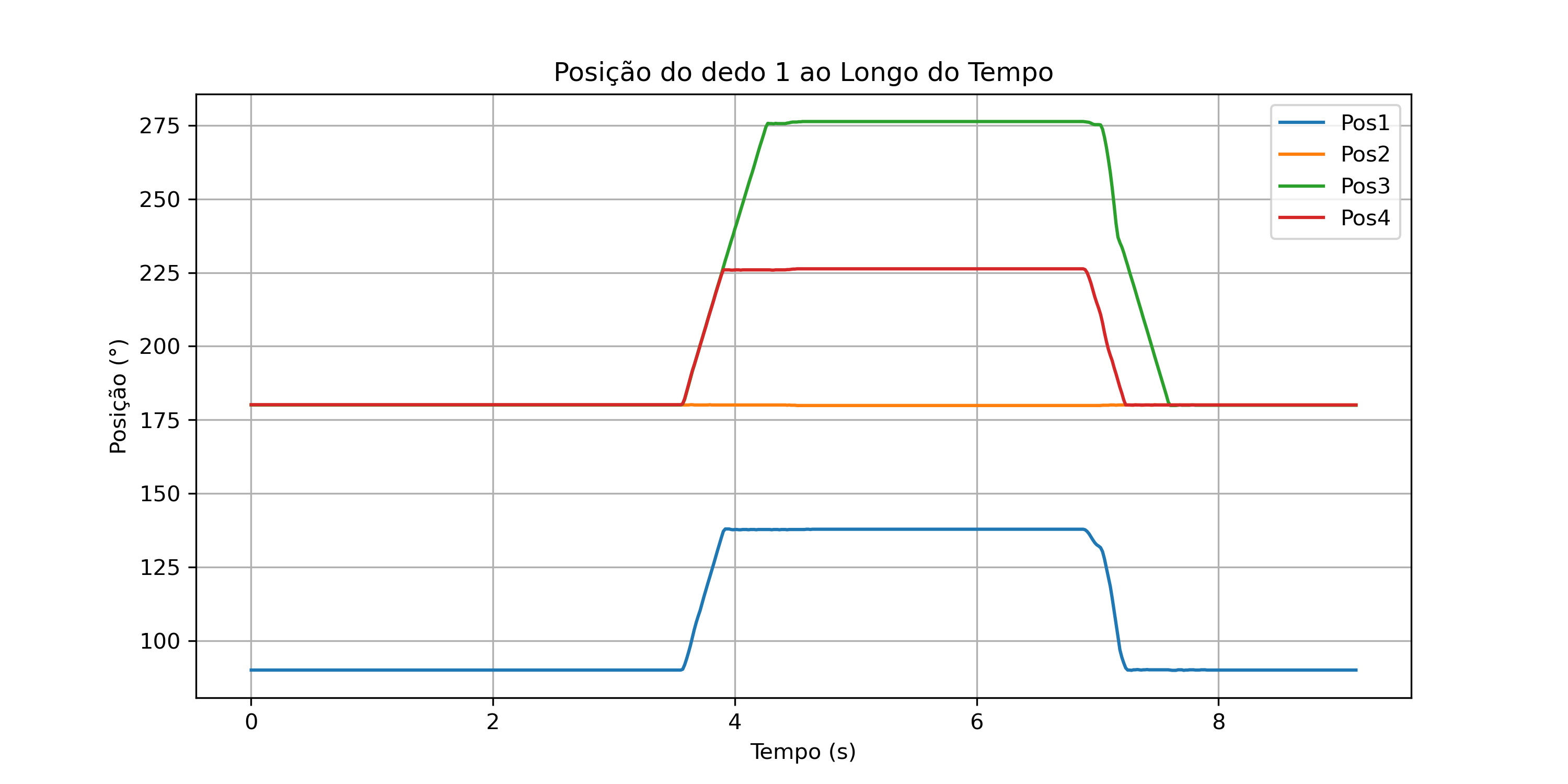 |
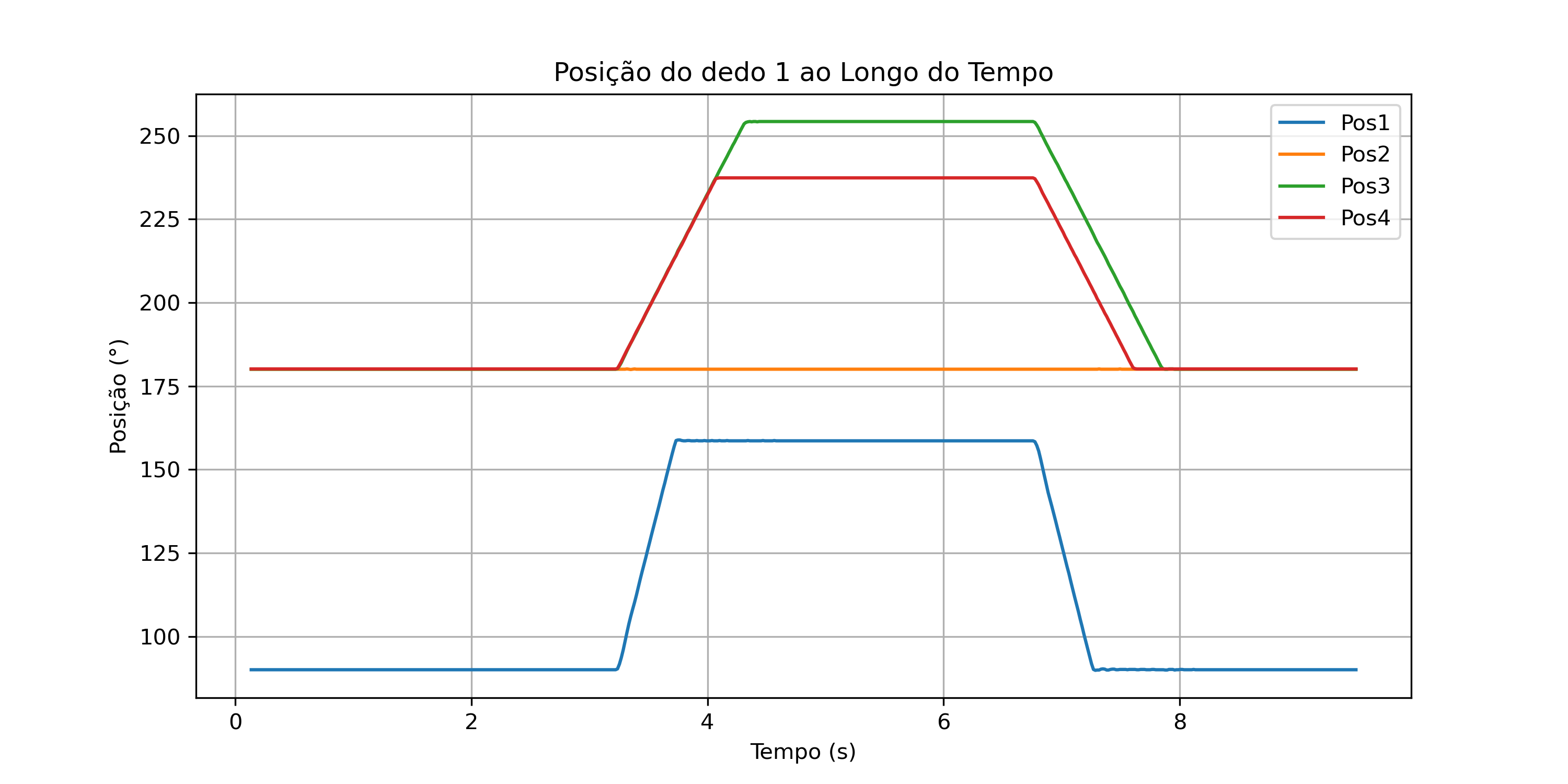
Posições do polegar
 |  |
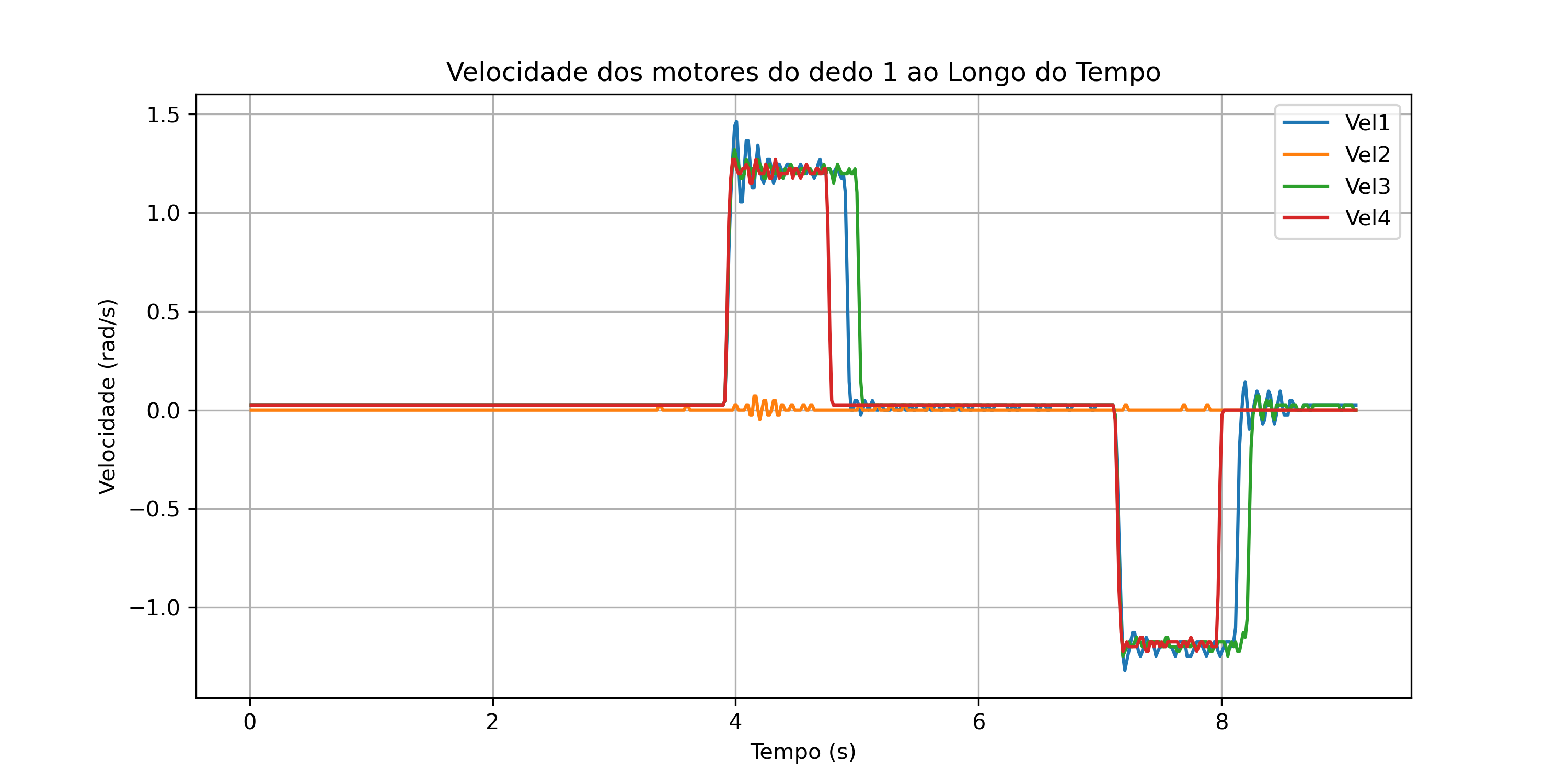
Velocidades do middle finger
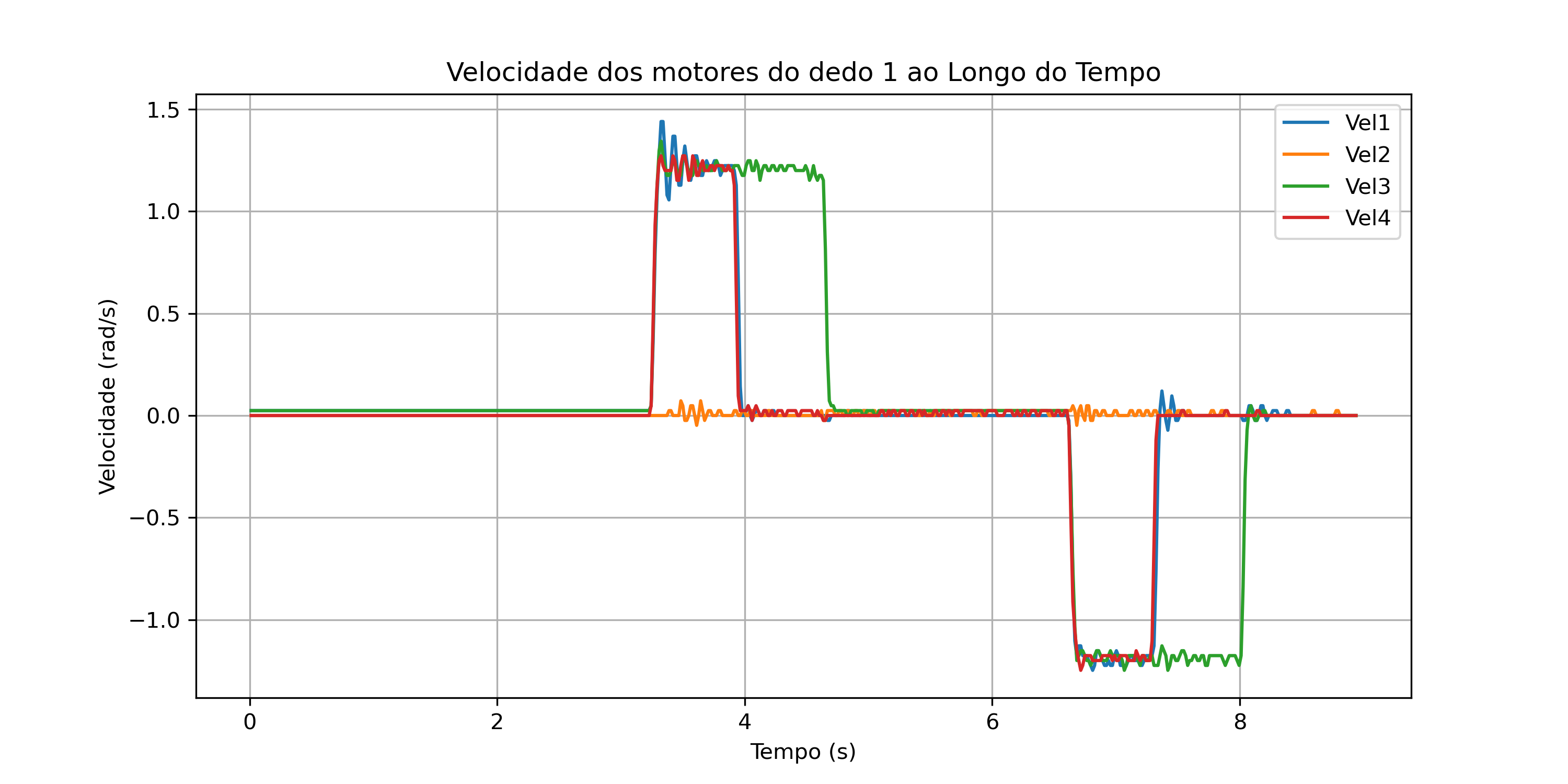 | 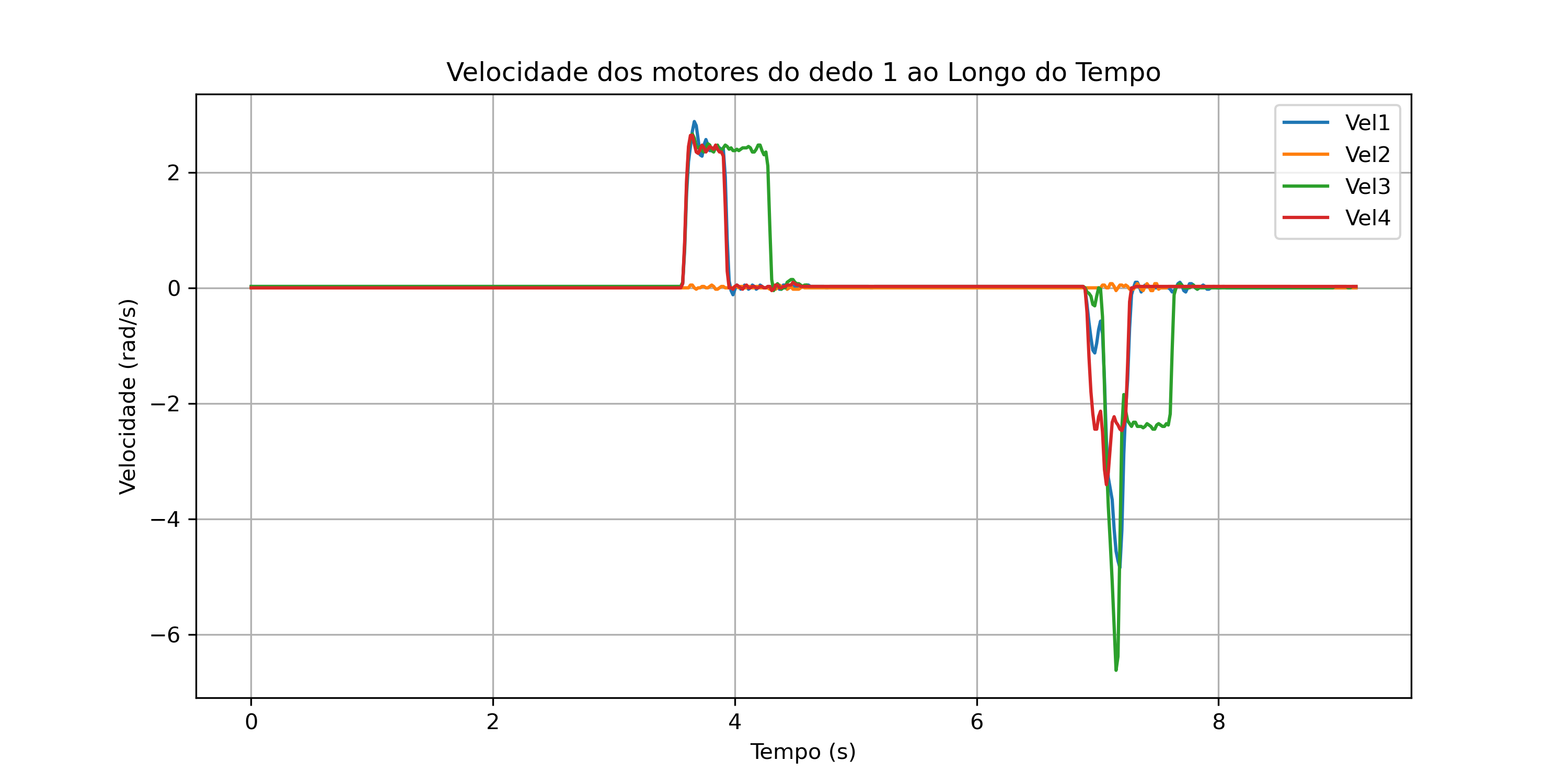 |
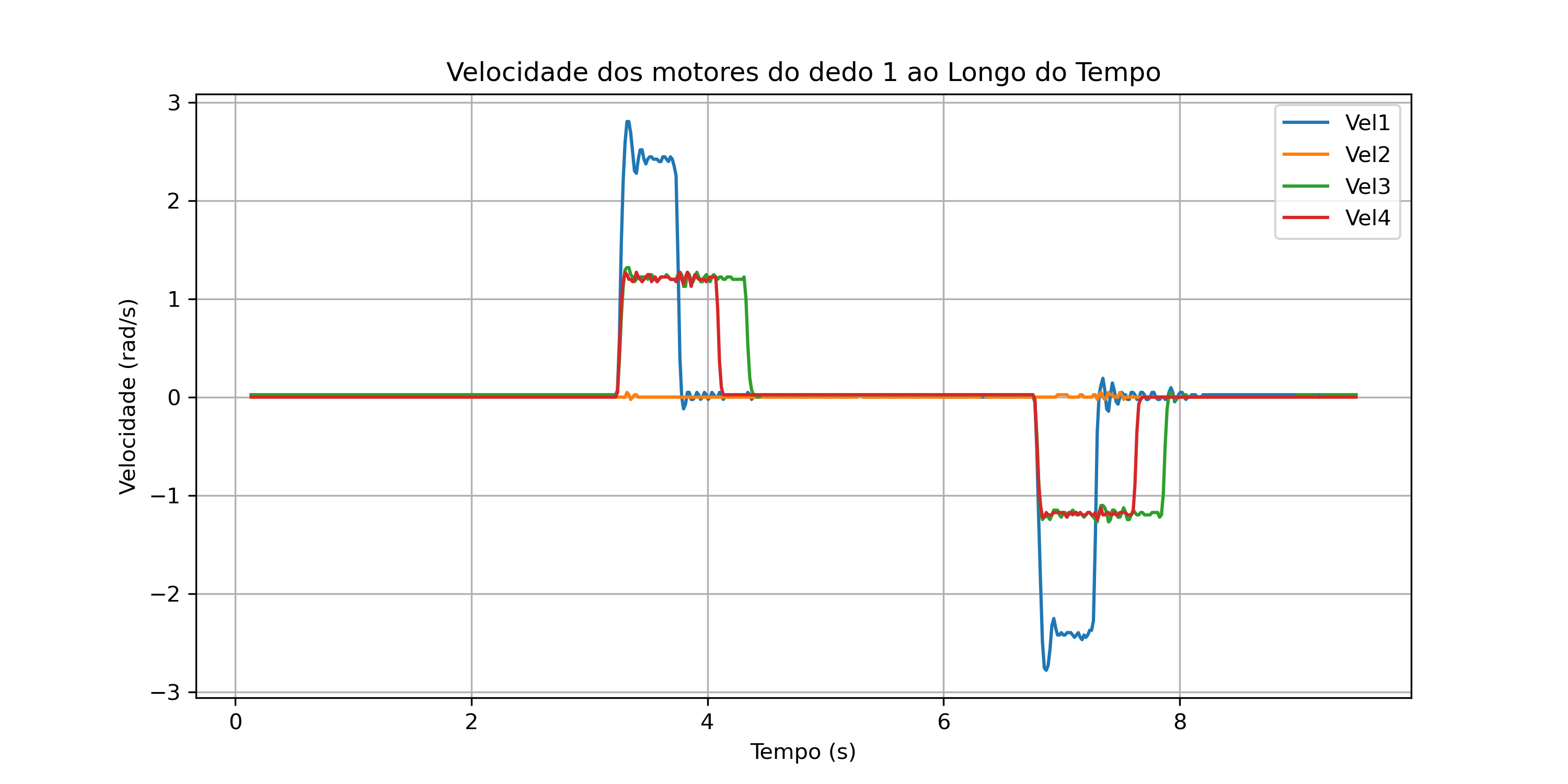
Velocidades do polegar
 |  |
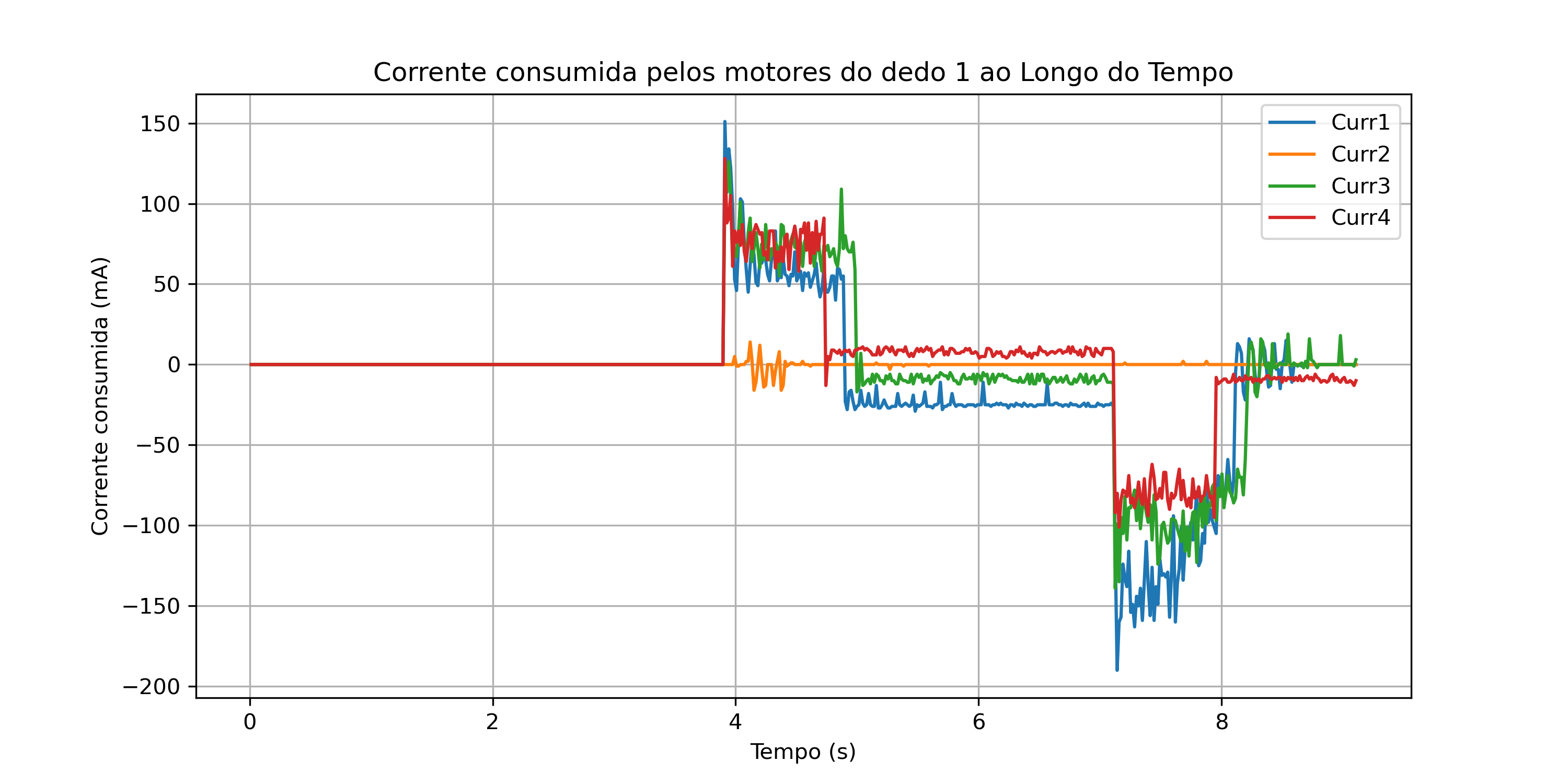
Correntes do middle finger
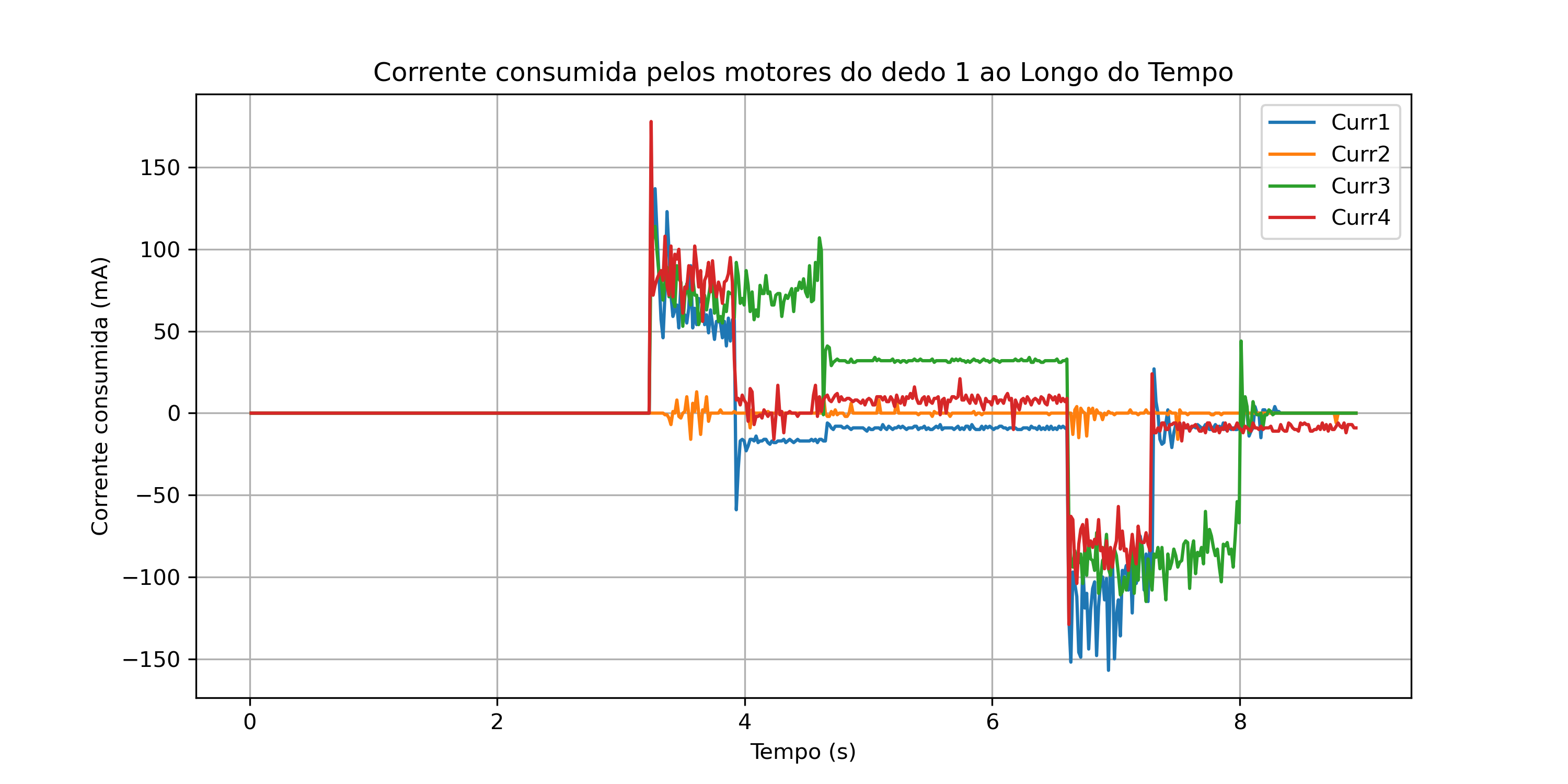 | 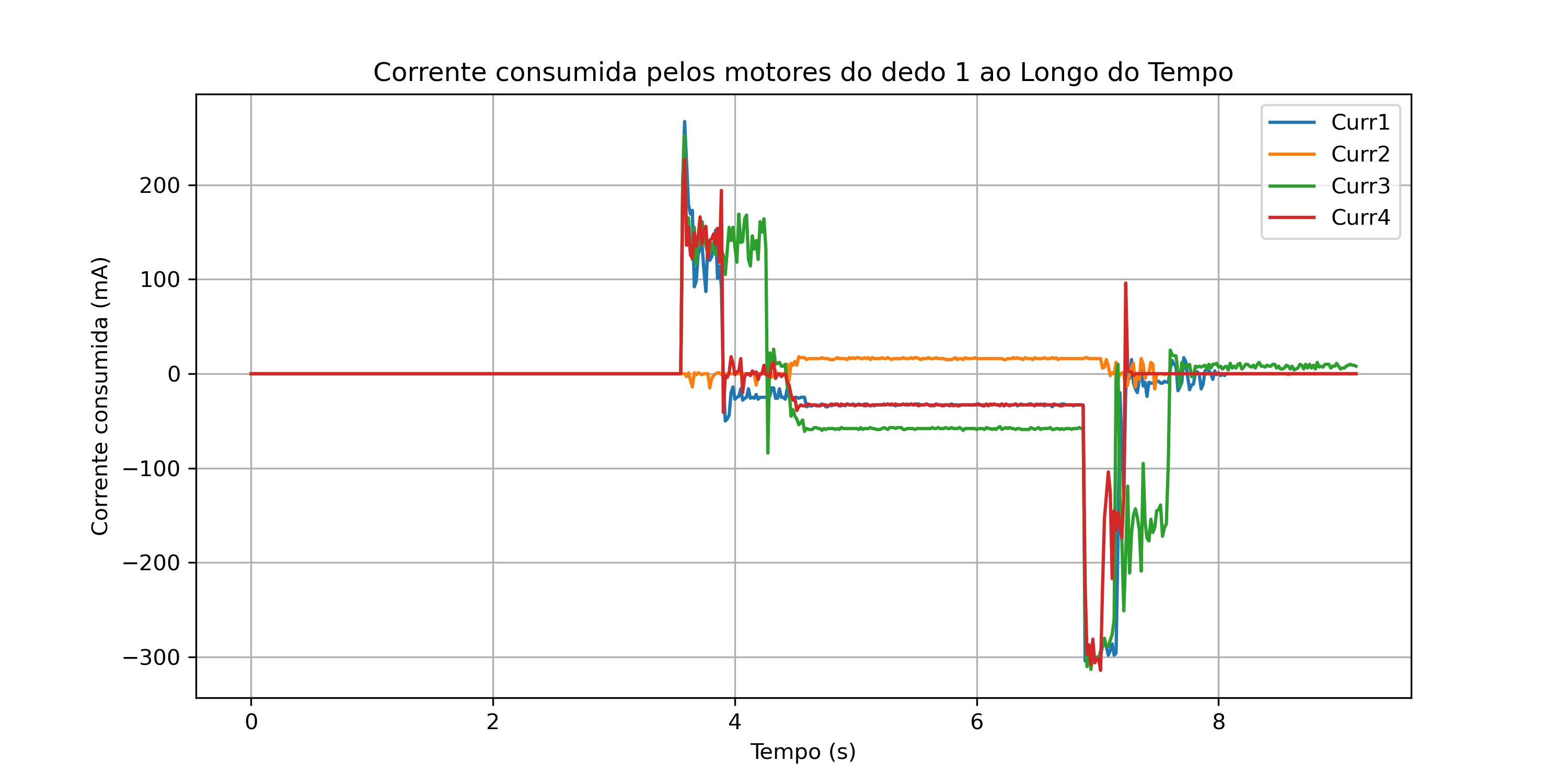 |
Correntes do polegar
 |  |
Vídeos


Conclusões
Através da análise dos gráficos e dos vídeos apresentados, é possível observar que, quando o middle finger opera com o dobro da velocidade do polegar, este último acaba por posicionar-se sobre o middle finger.
Velocidades relativas entre falanges
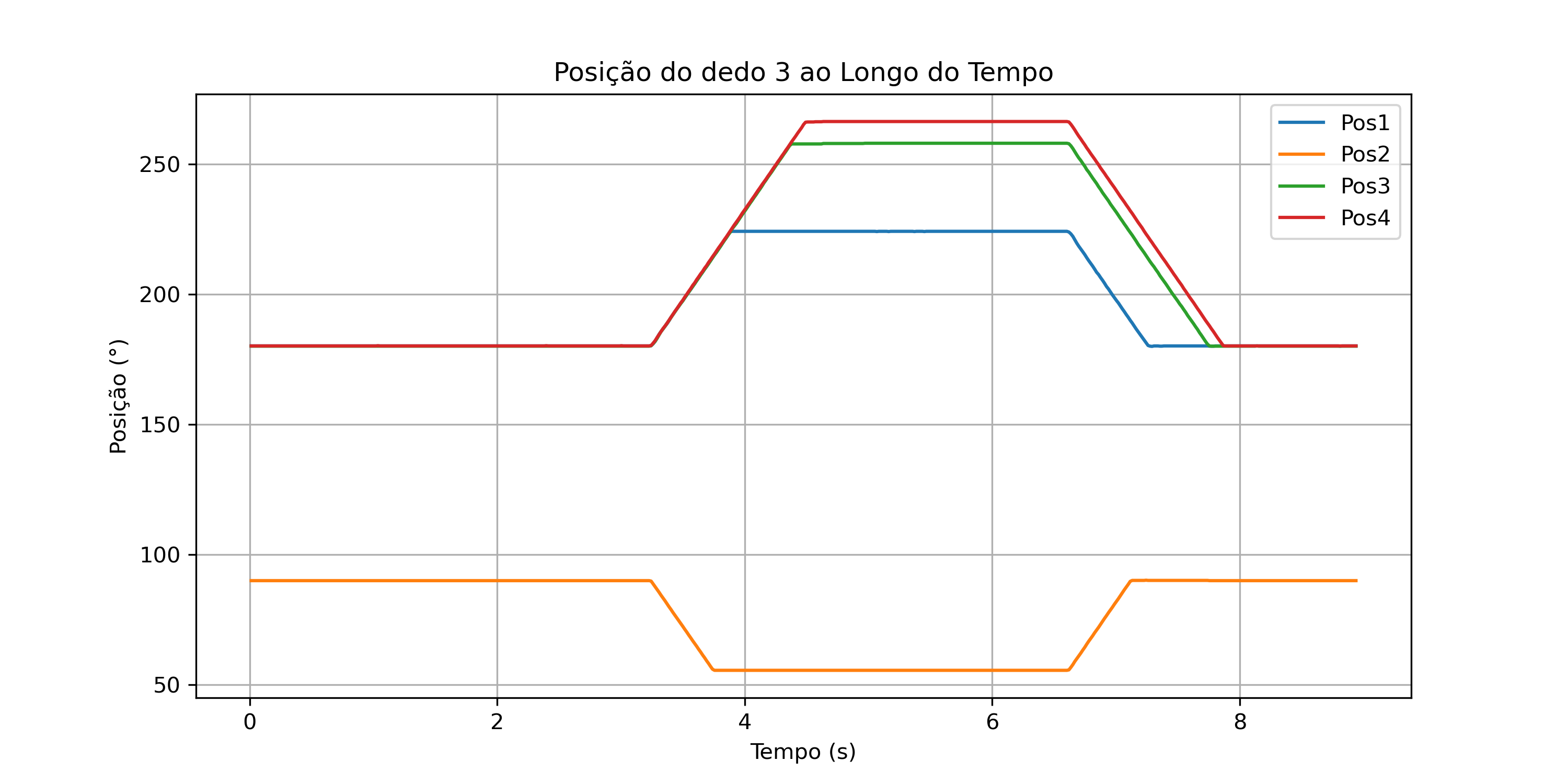
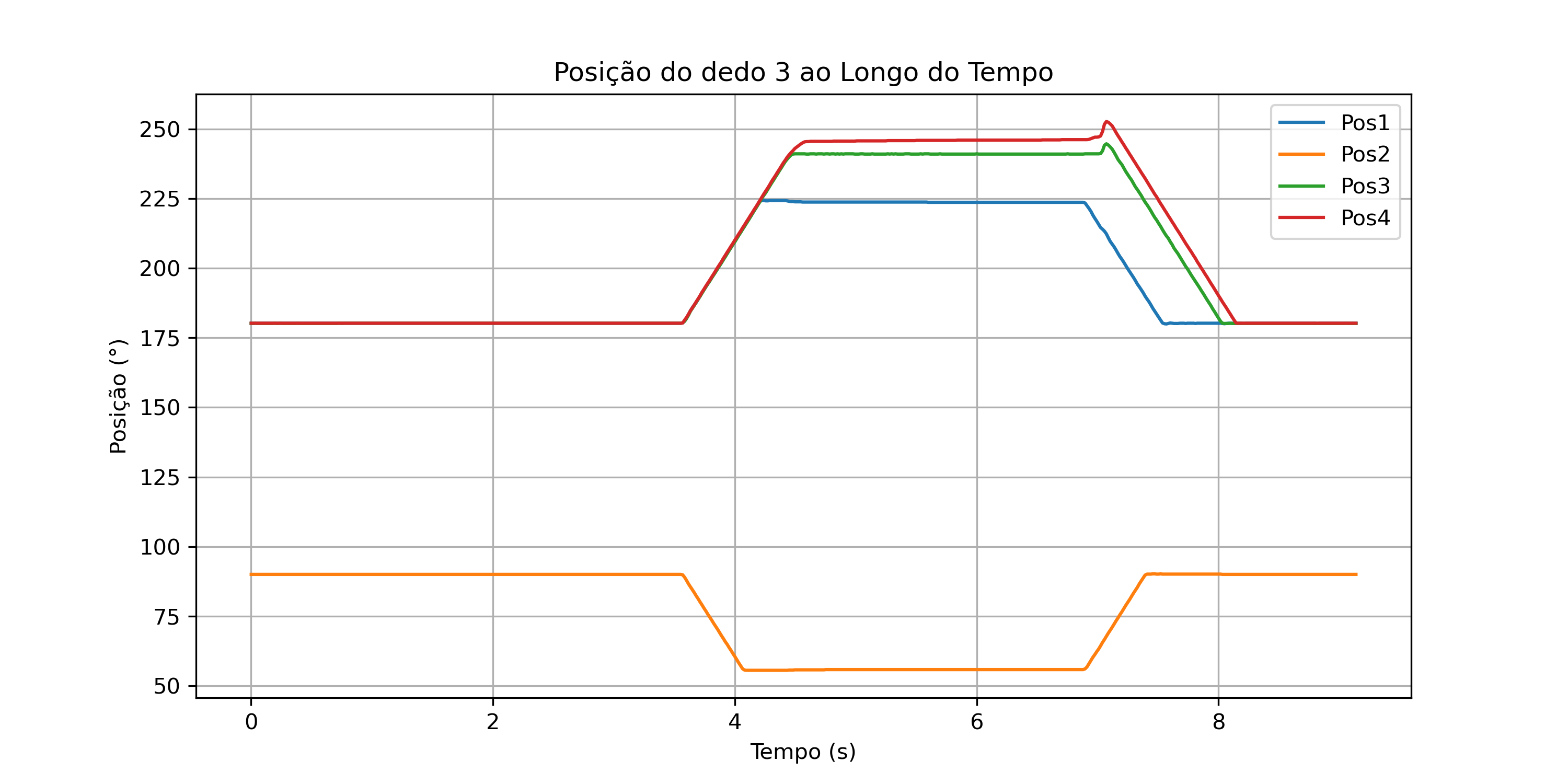
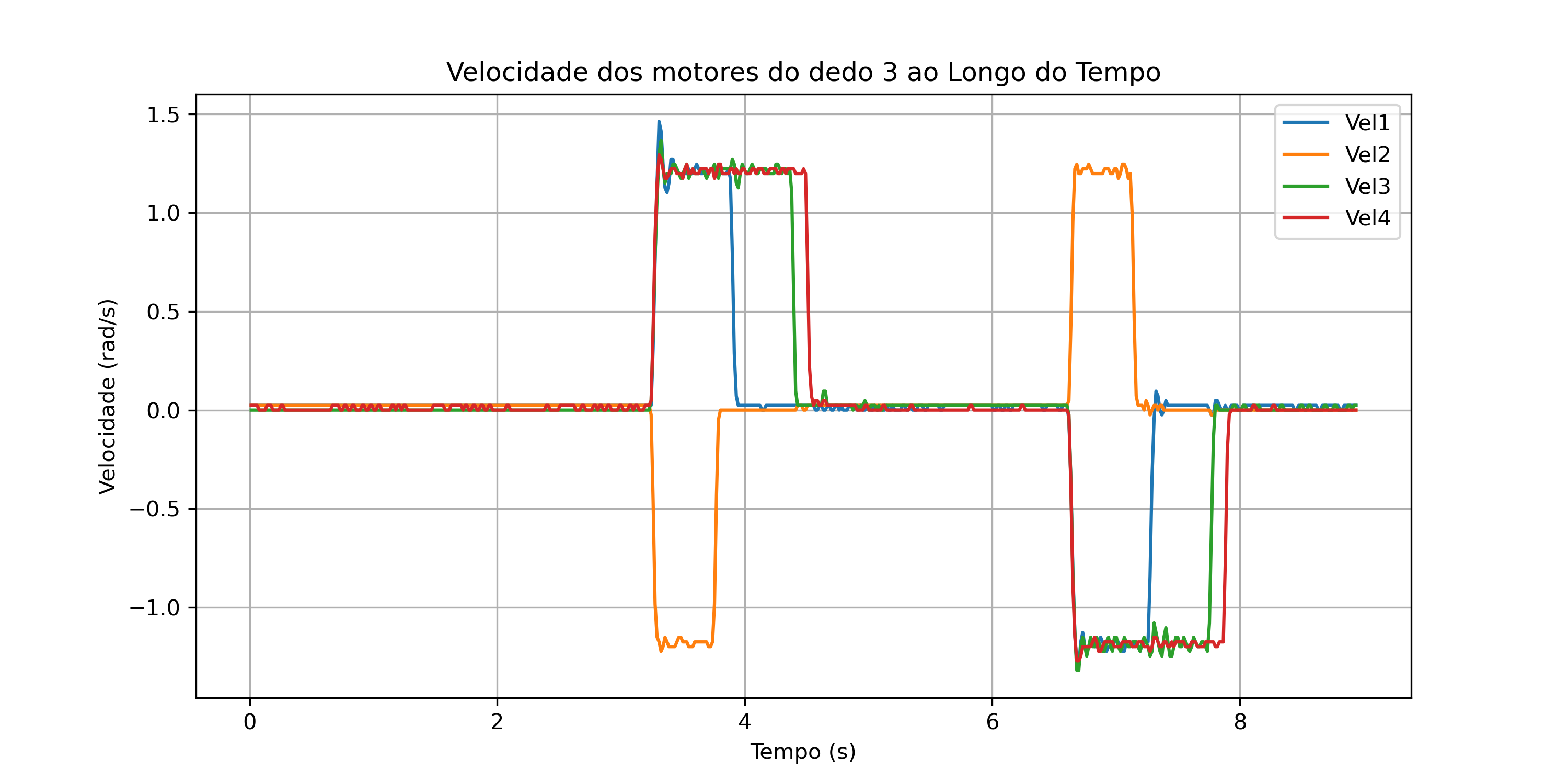
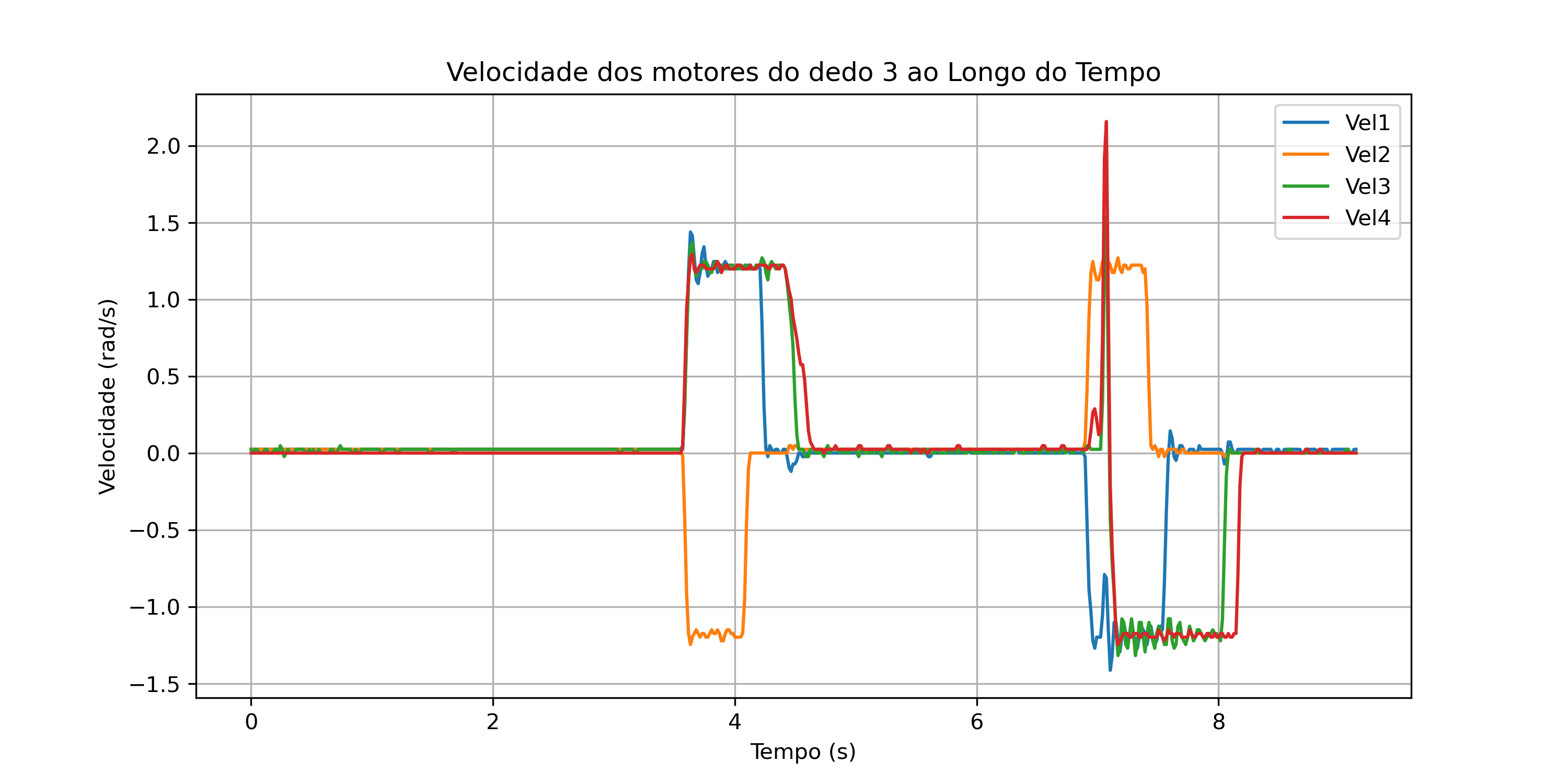
Nas figuras a seguir, são apresentados os gráficos de posição, velocidade e corrente do middle finger quando a primeira falange opera com o dobro da velocidade da ponta.
Adicionalmente, são disponibilizados os links para os vídeos no YouTube que documentam esta experiência, proporcionando uma análise mais detalhada e uma visualização em tempo real do comportamento da mão robótica.
Gráficos
Posições
 |  |
Velocidades
 |  |
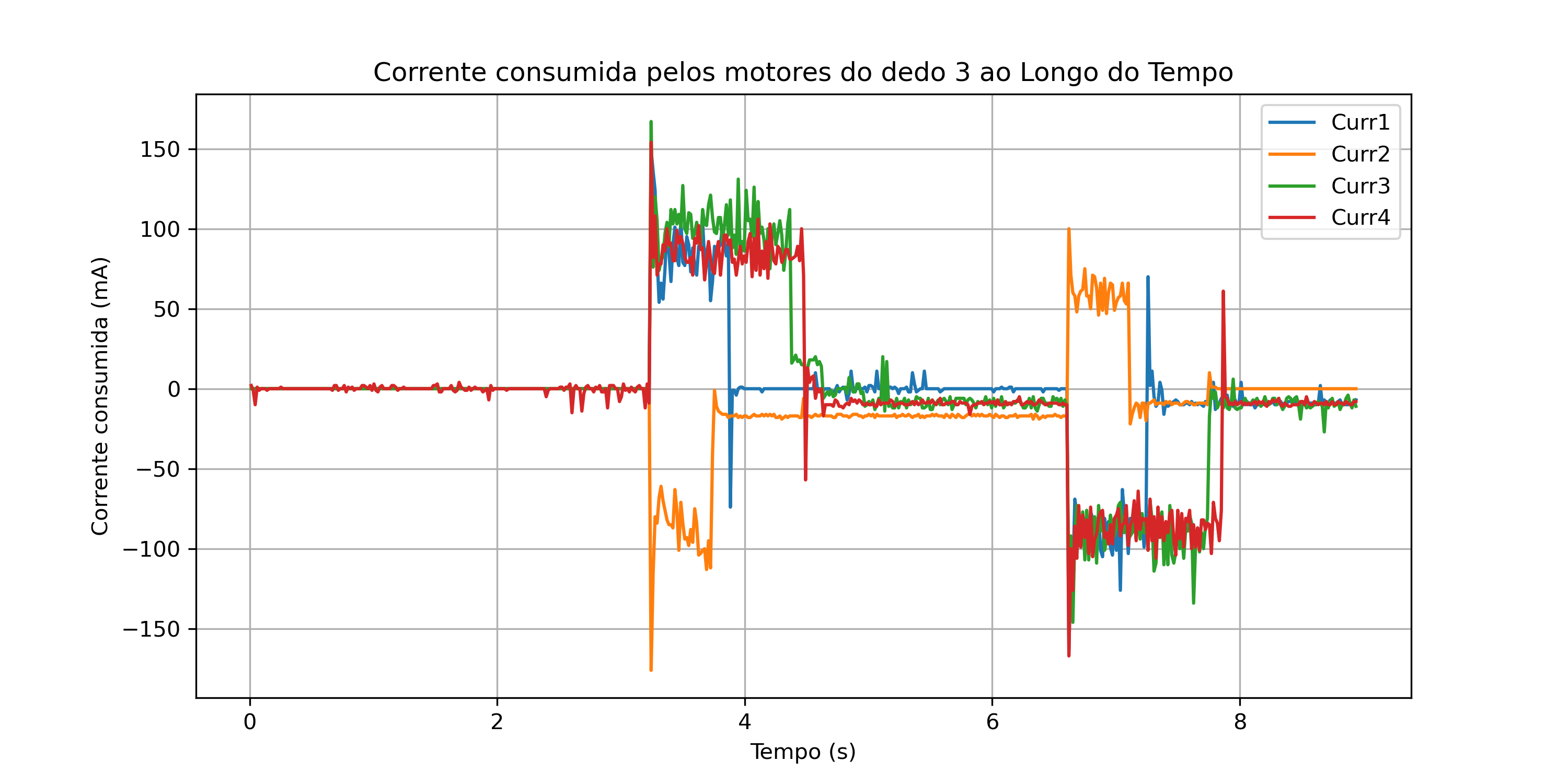
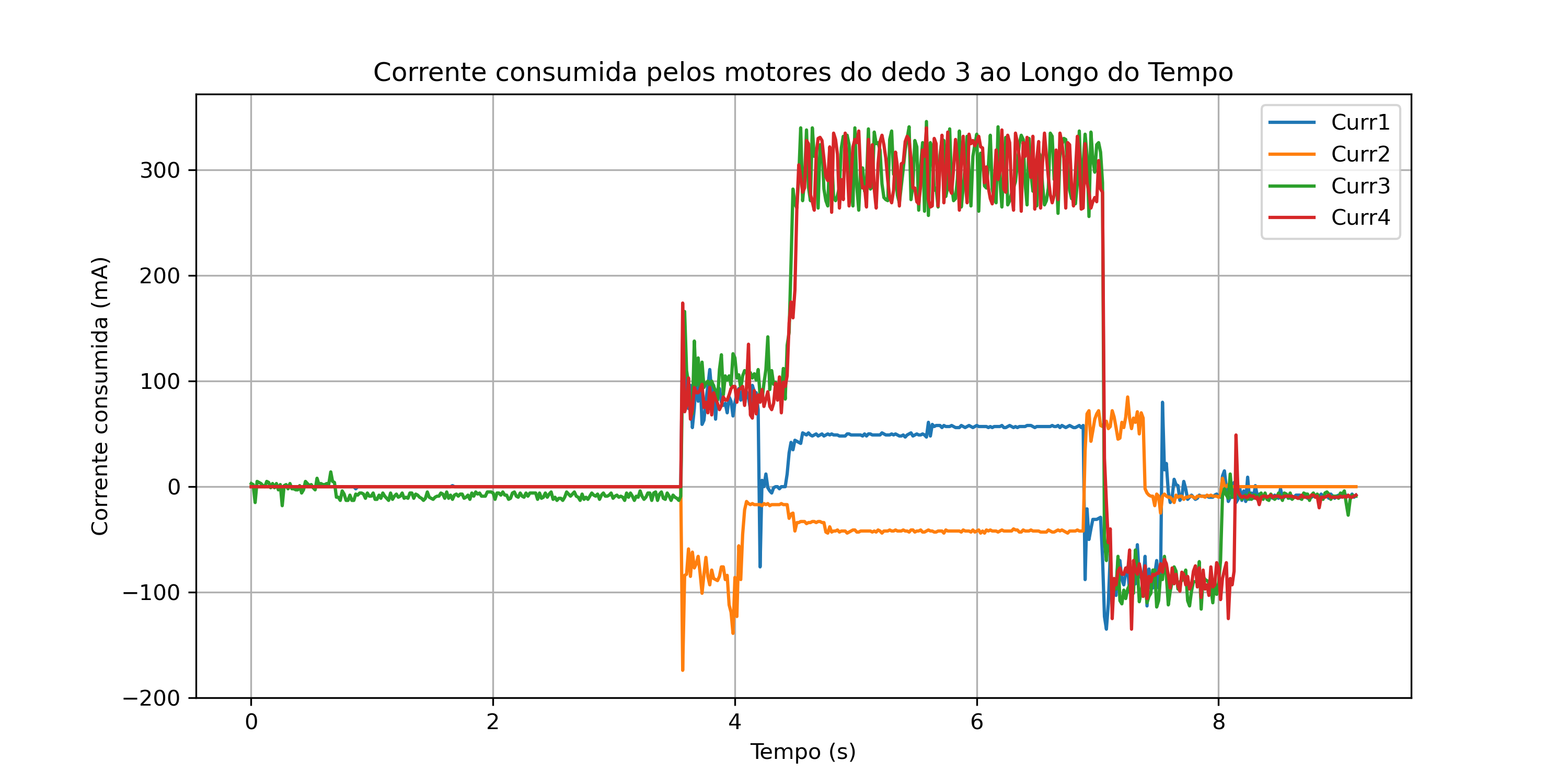
Correntes
 | 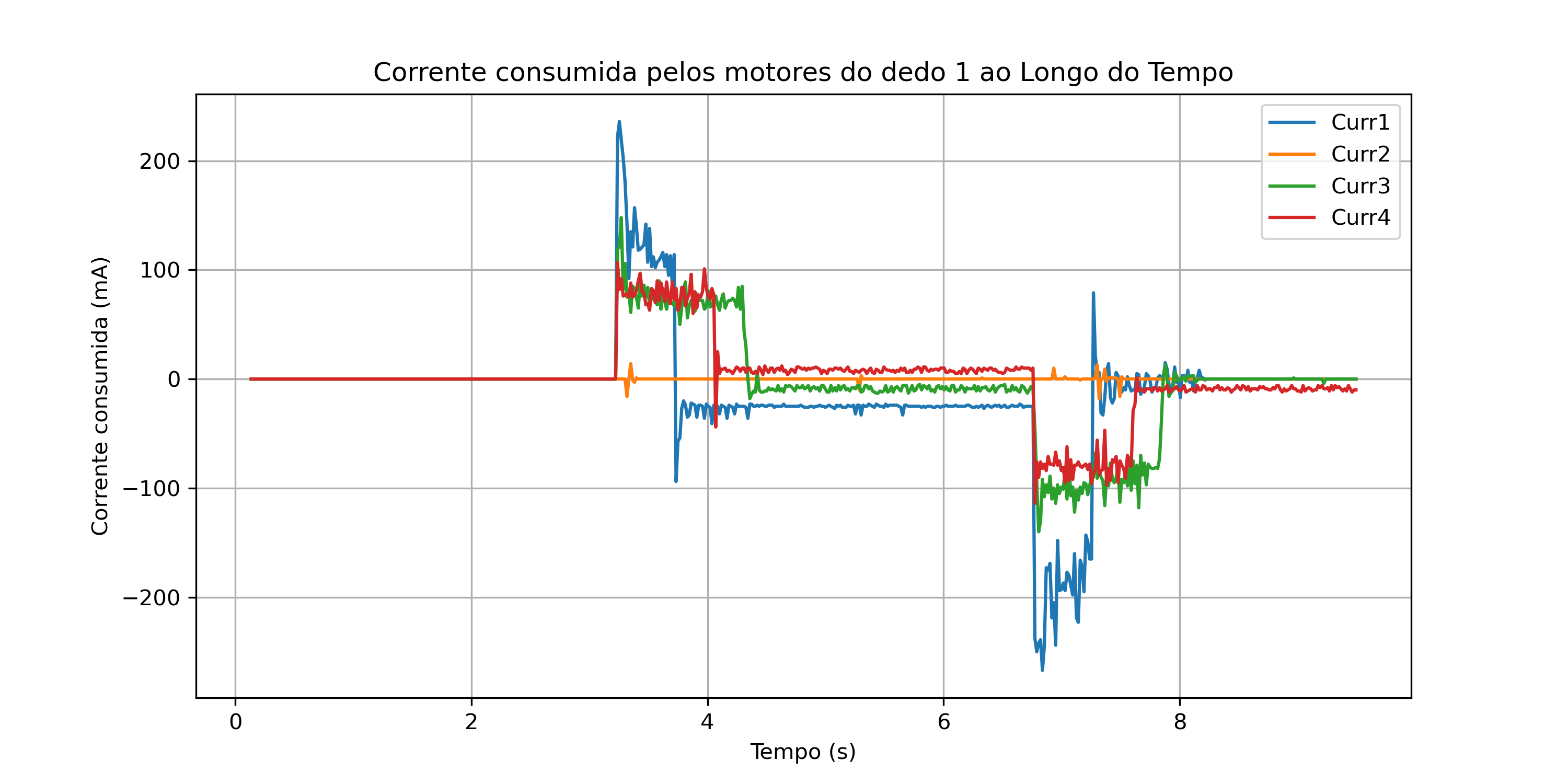 |
Vídeos


Código desenvolvido durante a semana
Durante esta semana, foram desenvolvidas e implementadas várias melhorias no código, nomeadamente:
- Desenvolvimento da classe Finger com o nome do dedo, fator de velocidade relativa do dedo e fatores de velocidades relativas entre juntas:
1
2
3
4
5
6
7
8
9
10
11
class Finger:
def __init__(self, name, factor, motor_factors):
self.name = name
self.factor = factor # Velocidade relativa do dedo
self.motor_factors = motor_factors # Velocidades relativas dos motores do dedo
def get_motor_speed(self, motor_name):
return PROFILE_VELOCITY_VALUE * self.factor * self.motor_factors.get(motor_name, 1.0)
def get_finger_speed(self):
return PROFILE_VELOCITY_VALUE * self.factor
- Desenvolvimento de um dicionário de dedos com todos os fatores de velocidades relativas:
1
2
3
4
5
6
self.fingers = [
Finger("index", 1, {"0": 1, "1": 1, "2": 1, "3": 1}), # finger_0
Finger("middle", 1, {"4": 2, "5": 1, "6": 1, "7": 1}), # finger_1
Finger("ring", 1, {"8": 1, "9": 1, "10": 1, "11": 1}), # finger_2
Finger("thumb", 1, {"12": 1, "13": 1, "14": 1, "15": 1}) # finger_3
]
- Desenvolvimento de uma função para a velocidade de um motor de um dedo através do índice do motor:
1
2
3
def get_motor_speed(self,motor_id):
finger_index = motor_id // 4
return self.fingers[finger_index].get_motor_speed(str(motor_id))
Desenvolvimento do nó
save_data_node.pypara guardar os dados de todas as experiências com as posições, velocidades e correntes de todos os dedosDesenvolvimento do script
check_colisions.pyque através do ficheiro URDF do robot permite obter as posições de cada junta relativamente à base da mão. Este script ainda se encontra em desenvolvimento e será adaptado para verificar a distância relativa entre os dedos e também verificar se existe alguma colisão.