Semana 1 - Materiais
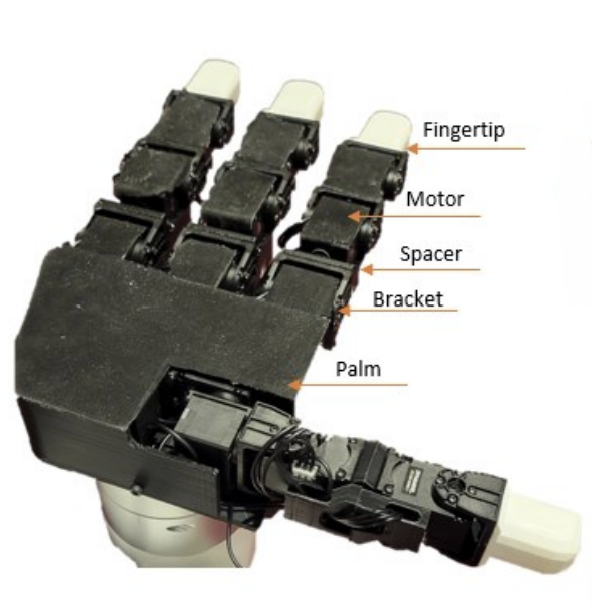
Este é o primeiro post de uma série semanal na qual irei relatar o progresso da minha dissertação de mestrado, cujo tema é o desenvolvimento de uma mão robótica antropomórfica que irá baseada no projeto LEAP Hand1. Este projeto tem como objetivo a construção de uma prótese robótica funcional, com foco na precisão dos movimentos e na resposta sensorial eficiente para posteriormente ser utilizada em projetos para a utilização de algoritmos de reinforcement learning na tarefa de “grasping” de objetos.
Nesta fase inicial, o trabalho está concentrado na elaboração de uma lista de materiais e na pesquisa de sensores apropriados para a integração ao sistema uma vez que estes sensores irão ser cruciais no desenvolvimento do “tato” desta mão.
Materiais necessários para a montagem dos motores
| Componente | Quantidade |
|---|---|
| Dynamixel XC330-M288-T | 16 |
| Dynamixel FPX330-H101 | 11 |
| Dynamixel FPX330-S101 | 12 |
| Dynamixel FPX330-S102 | 6 |
| Dynamixel U2D2 | 1 |
| XT30 Pigtail | 1 |
| JST EH ASEHSEH22K305 | 15 |
| JST EHR 3 | 5 |
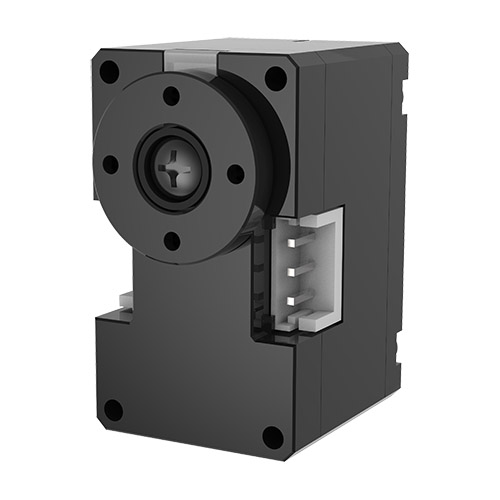
Dynamixel XC330-M288-T
Os motores DYNAMIXEL XC330-M288-T são motores que nos permitem realizar movimentos suaves e controlados tendo sempre feedback da sua posição, o que os torna muito adequados esta tarefa.
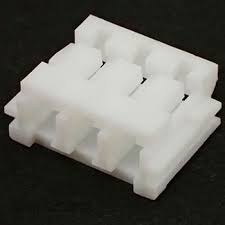
Dynamixel FPX330-H101, Dynamixel FPX330-S101 e Dynamixel FPX330-S102
Estas peças são as molduras dos motores que os protegem no caso de algum acidente. Na lista de materiais apresentada, consideram-se 2 peças extra do DYNAMIXEL FPX330-S101 uma vez que em caso de acidente, esta peça poderá partir de forma a proteger o resto da mão.



Dynamixel U2D2
O U2D2 é um dispositivo de interface USB para comunicação com os motores DYNAMIXEL. Ele atua como um conversor USB para TTL, permitindo que o computador ou outro dispositivo controlador se conecte diretamente aos motores DYNAMIXEL para enviar comandos e receber feedback.

XT30 Pigtail, JST EH ASEHSEH22K305 e JST EHR 3
Estas peças combinadas serão utilizadas para conectar a fonte de alimentação ao U2D2 e a cada um dos dedos da mão robótica. Utilizam-se estas peças em substituição do U2D2 Power Hub de forma a ter uma montagem mais simples e organizada.


Incorporação de sensores
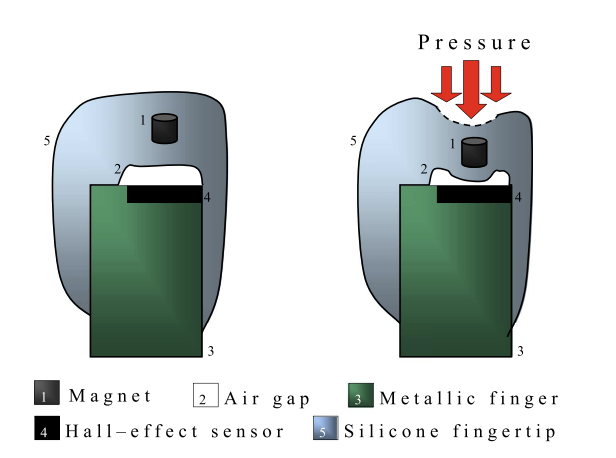
Após realizar uma pesquisa sobre sensores utilizados em mãos robóticas antropomórficas, observou-se a existência de diversas soluções comerciais (como o BioTac fingertip) e também foram desenvolvidas várias abordagens por diferentes autores, que utilizam técnicas variadas, como, por exemplo, sensores baseados no efeito Hall2. No entanto, estas soluções tornam-se dispendiosas e muito complexas de integrar noutros projetos.

Uma alternativa de baixo custo e relativamente fácil de incorporar é o sensor FSR (Force Sensing Resistor) que permite a deteção de força ou pressão aplicada numa superfície. O princípio de funcionamento destes sensores é baseado na variação da resistência elétrica de materiais poliméricos quando são deformados ou comprimidos e uma das suas grandes vantagens é o facto de serem relativamente maleáveis, permitindo uma aplicação simples.

Após analisar as pontas dos dedos da mão robótica, conclui-se que os sensores FSR redondos são a melhor opção, já que estes se adaptam melhor à geometria irregular das pontas dos dedos. Os sensores quadrados, por sua vez, apresentam dimensões maiores, o que pode dificultar o encaixe e o desempenho adequado.
Entre os modelos redondos disponíveis, destacam-se o FSR 400, com diâmetro de 7.62 mm, e o FSR 402, com 18.28 mm. Ambos são muito semelhantes, sendo a única diferença o tamanho. Em relação aos sensores quadrados, apenas existe um modelo, o FSR 406, que possui dimensões 43.69x43.69 mm. Todos estes sensores possuem uma sensibildade de força entre 0.2 N e 20 N, o que corresponde a uma massa entre 20 g e 2 Kg.
Nesta fase inicial, considera-se que a melhor abordagem para a incorporação dos sensores será aplicar sensores FSR 400 em cada ponta dos dedos da mão robótica e um sensor FSR 406 na palma da mão.
Lista de sensores
| Componente | Quantidade |
|---|---|
| Sensor FSR 400 | 4 |
| Sensor FSR 406 | 1 |
Outros acessórios
Nesta secção apresenta-se uma lista de alguns acessórios não listados anteriormente mas que são cruciais para o desenvolvimento das restantes peças, nomeadamente o material para produzir as peças impressas em 3D.
| Componente | Quantidade |
|---|---|
| M3 6mm 3D printer inserts | 5 |
| M2 6mm 3D printer Inserts | 24 |
| M2 8mm Screws | 16 |
| M2 10mm Screws | 24 |
| M2 6mm Screws | 4 |
| M3 6mm Screws | 5 |
| Polymaker PLA Pro | ~200g |
| Filamento TPU | 100g |
| Power Supply ( 5V 30A) | 1 |
| Power Cable AC | 1 |
| 14 AWG 5V Cable | 1 |
Referências
SHAW, Kenneth; AGARWAL, Ananye; PATHAK, Deepak. Leap hand: Low-cost, efficient, and anthropomorphic hand for robot learning. arXiv preprint arXiv:2309.06440, 2023. ↩︎
JAMONE, Lorenzo, et al. Highly sensitive soft tactile sensors for an anthropomorphic robotic hand. IEEE sensors Journal, 2015, 15.8: 4226-4233 ↩︎